|
|
LEGO ROBOT ANT by RICHARD TAYLOR
|
|
|||||||||||||||||||||||||
|
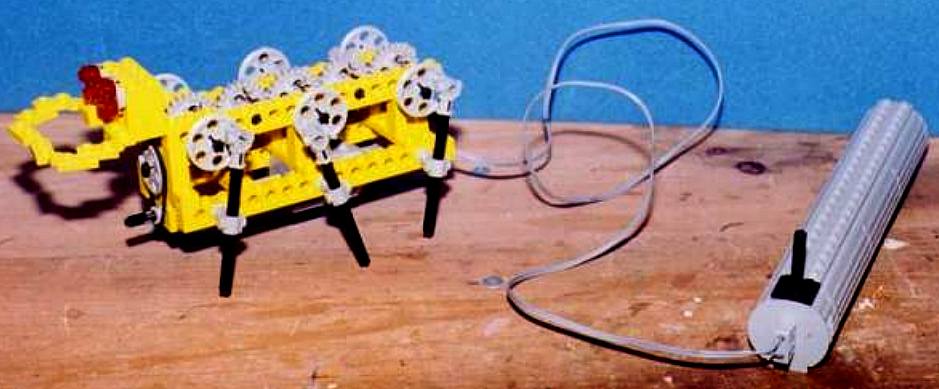
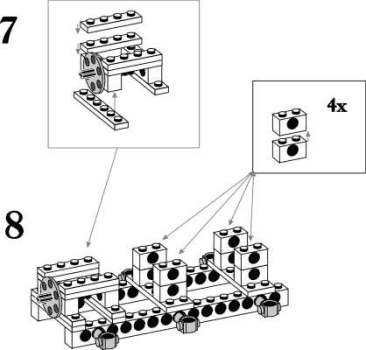
This is what your Lego ant robot should look like. It does not look a lot like a real ant, but it is a hexapod, so it does have six legs just like an insect.
According to Richard, this ant design needs quite a lot of power to lift itself up and down as it walks. He suggests that you use fresh batteries in your motor's power box. Reversing the direction that the motor spins, using the switch on the power box, will make the ant walk forwards and backwards - but not turn corners. To be able to do that this robot would need two motors and two sets of gears, one for each side of the ant.
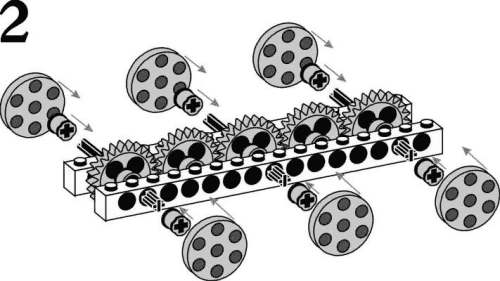
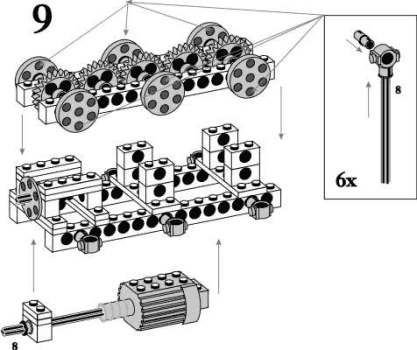
Helical (6) cut gears are not that efficient. Also, the sliders create a lot of drag where the ratio of turn (9) to leg-stroke length is not conducive to an effective walking gait. Lubrication would ease the leg (push-rod) movement, but would also make a mess as any fluids dribbled down the legs onto a table.
The object of this exercise is to get young engineers to experiment to use motors in different ways to achieve locomotion. By amalgamating motors with static Lego parts, budding students can bring their creations to life.
This is NOT an official LEGO® Web site. This is an article by an enthusiast who likes experimenting LEGO® blocks. The name "LEGO" is a registered trademark of the LEGO Group of companies which does not sponsor, authorize or endorse this web site.
LEGO on Youtube
DINOSAURS - DOLPHINS - HUMANOIDS - RAYS - SHARKS - WHALES
ARDUINO - ARM HOLDINGS - BEAGLEBOARD - MBED - PCBS - PICAXE - RASPBERRY PI
LINKS
http://megarobot.webs.com/lego.htm http://en.wikipedia.org/wiki/Lego_Mindstorms http://www.robotee.com/index.php/proffesional-lego-robotic-arm-11023/ http://blog.mostlyrobots.net/tag/autonomous-vehicle/ http://www.lego.com/ http://www.picaxe.com/ http://3drobotics.com/ http://wiring.org.co/ http://www.arduino.cc/ http://www.youtube.com/user/RaspberryPiTutorials http://www.raspberrypi.org/
ANTICS - ARDUINO - ARMOUR - ARTWORK - BIOLOGY - BLACK BOX - COMPUTERS - ELECTRONICS - ENERGY - FRAME FORMICARIUM - HEAD - JAWS - JIMMY WATSON - KITS - LEGS - MECHANICS - MOTORS - MOVIE - PHOTOGRAPHY - RASPBERRY Pi R/C DRONE - SENTRY SOFTWARE - SOUND PROOFING - SPACE ROVERS - SPEED - SUSPENSION - TAIL - UKRAINE DRONES - WEAPONS - WARGAMING
A Sectasaur™ (thawed) - now on permanent display at Herstmonceux Museum, in Sussex, England.
|
|||||||||||||||||||||||||||
|
This website is Copyright © 2024 Bluebird Marine Systems Limited. The names AmphiMax™, Bluebird™, Miss Ocean™, Ecostar DC50™, and the blue bird in flight logos are trademarks. All other trademarks are hereby acknowledged. The color blue is a protected element of the marks.
|
|||||||||||||||||||||||||||