|
|
SCOUT
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
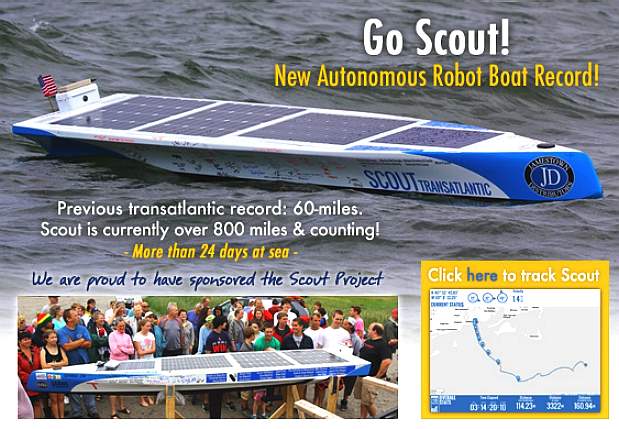
Scout is an autonomous robotic boat designed to complete the first unmanned transatlantic crossing. The project was started by Tiverton students Dylan Rodriguez and Max Kramers in 2010 with the goal of creating an autonomous craft to make the journey from Rhode Island to Sanlucar de Barrameda, Spain.
Scout is not the first robot vehicle to cross the Atlantic autonomously, the Seagliders have been doing that for quite a while. But a Seaglider is a gravity powered underwater vessel, not a solar powered surface vessel, so is quite impractical for passengers. The technology change is interesting because it is potentially zero carbon transport which can be developed for cargo, etc. Scout was averaging 41. 6 miles a day [20-9-13], which is 1.73 mph. A fantastic achievement for the team - especially with such a small boat, and note the 4.9 mph velocity on the 27th Sept (34th day). But, check out the most recent statistics using the links below to the official Scout website where you will see that the brave little craft is now in the robotic doldrums [sniff] and we are calling off the search and rescue following. Well done though Scout Team.
Fast forward to 2020, a team comprising Promare, IBM, and many other technology partners, decided to try cross the Atlantic against the prevailing winds and currents. They tried to build a 100ft craft named Mayflower Autonomous Ship (MAS) for launch and an attempt for the 400th anniversary of the Pilgrim Fathers journey starting on the 6th of September 1620.
They never made that date, but did manage to get a hull in the water for the ceremonies in Plymouth, Devon in 2020. On the 15th June 2021, the unmanned craft departed from Plymouth. You can follow the journey on their blog: https://mas400.com/dashboard
MAS 400 - The fully autonomous trimaran Setting off from Plymouth, England on the 15th June 2021. There are solar panels, that presumably add to the diesel-electric setup. The idea is to be COLREGs compliant with a self learning program, as such vessels build a database. Much the same as with the current bevy of self-driving robotaxis and robotracks. The question is therefore, will ships beat trucks to the autonomous punch?
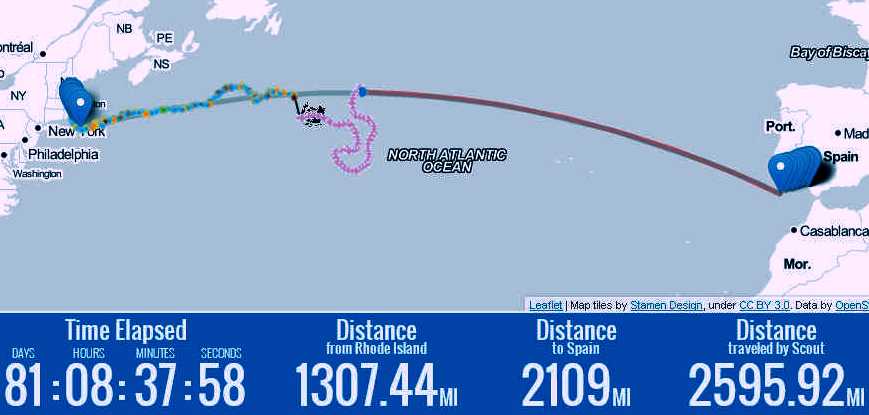
13 NOVEMBER 2013 STATS Time
Elapsed: 81 DAYS: 08 HOURS: 37 MINUTES: 58 SECONDS Distance
traveled by Scout 2595.92
Velocity: 0.7 mph
6 NOVEMBER 2013 STATS Time
Elapsed: 74 DAYS: 04 HOURS: 57 MINUTES: 28 SECONDS Distance traveled by Scout
5672.65 M Velocity: 2.04 mph
30 OCTOBER 2013 STATS Time
Elapsed: 67 DAYS: 00 HOURS: 58 MINUTES: 49 SECONDS
23 October 2013 STATS Time
Elapsed:60 DAYS: 04 HOURS: 05 MINUTES: 09 SECONDS
20 OCTOBER 2013 STATS Time
Elapsed: 57 DAYS: 06 HOURS: 09 MINUTES: 17 SECONDS Distance
traveled by Scout 2078.85
Velocity: 1.54 mph
14 OCTOBER 2013 STATS (Snoopy Sloop UK Microtransat was re-launched 11-10-13) Time
Elapsed: 51 DAYS: 07 HOURS: 12 MINUTES: 00 SECONDS
CURRENT STATUS: N 39° 13’ 20.07” W 47° 44’ 30.24” Compass 0° Waypoint 0° CoG 255°
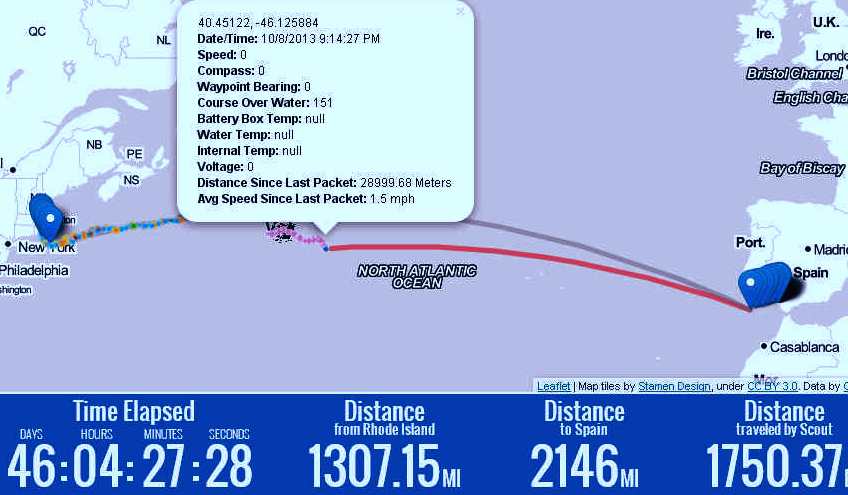
9 OCTOBER 2013 STATS Time Elapsed:
46 DAYS: 04 HOURS: 27 MINUTES: 28 SECONDS Distance
traveled by Scout 1750.37
Velocity 1.5 mph
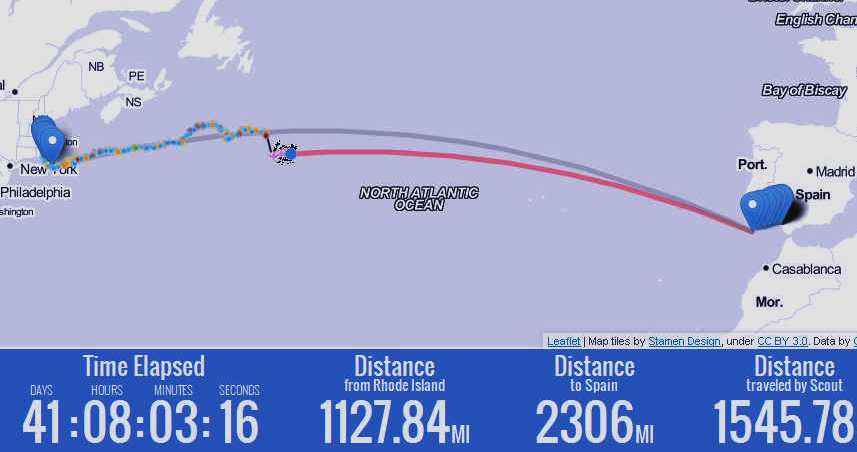
4 OCTOBER 2013 STATS Time
Elapsed: 41 DAYS: 08 HOURS: 03 MINUTES: 216 SECONDS
CURRENT STATUS: N 41° 33’ 1.52” W 49° 22’ 10.4” Compass 0° Waypoint 0° CoG 109°
The big pond - On these maps it looks like Scout has traveled more than a third of the way, but on reading the figures you will notice that there is more than twice the distance to Spain, than to Rhode Island. You may also notice from the above that to travel 971 miles from Rhode Island, that Scout has sailed 1318 miles. This means that for every mile toward her destination, Scout is traveling 1.35 x the route as the crow flies. Most boats deviate to avoid storms, or in the case of sailing boats, to try and find favorable winds. Notice also the significant course correction/deviation from the 37th day, crossing the famous sinking of the Titanic on the 40th day.
LAUNCHES - If at first you don't succeed - after several iterations:
1. Scout's first transatlantic attempt was launched from Sakonnet Point on June 29, 2013 but unfavourable weather conditioned forced the team to recover the craft the same day.
2. A second launch was made July 4, 2013 but after two days a technical failure forced another recovery effort and a redesign of parts of the vessel.
3. The third attempt was launched during the early morning of August 24, 2013 and is currently in progress but has already earned the record for distance of an unmanned Atlantic naval voyage.
CONCEPT - Unlike the many contestants in the Microtransat (MT) competition, Scout is powered by solar panels, not sails. Other than that, the idea is the same; to get across the Atlantic autonomously and they are using similar gps, tracking and computer equipment as many of the MT teams seem to favour.
Scout started out as a Kickstarter project, soon to be sponsored by many supporters, mainly because the team seem to have a handle on what they are doing and it is a brilliant idea, setting both Atlantic (and world) records when things come together. We will be looking at the design of boats in general, during the coverage of this project - and comparing with other robotic developments.
Key to phases of robotic operation
TECH SPECS BASICS
Scout is based on a custom carbon fiber hull with a Divinycell foam core and measures 12.8 feet long, by 25 inches wide and weighs 160 pounds. The vessel design incorporates a bulb keel to right the craft in heavy seas, and propulsion is provided by an electric trolling motor powered by a bank of solar-charged lithium iron phosphate batteries. On-board control and navigation is provided by two Arduino microcontrollers and a GPS receiver, and telemetry data is sent back to the team using the Iridium satellite constellation and provided live on the World Wide Web.
HULL SPECS - We are not sure what the exact mass of the vessel is (starting at around 140lbs, now 160lbs), nor the exact size of the solar panels, so can only guess on these, and as a mono-hull at around 13 x 2 feet, she is going to be bouncing around all over the place (riding up and down waves) according to the LWL rule, making wave drag very high - in the process reducing average speed. In theory the hull presents to a calm sea a narrow canoe shape, so should be efficient. In practice, the hull flare is being wetted as she climbs then descends wave troughs, slowing her down. See the Youtube of a SWASH hull running straight in waves and compare that to Robotboat MKVI which is also bouncing considerably. That kind of technology is not practical at this scale and budget. The Scout team chose a rugged compromise, which given the task ahead was wise.
The route is roughly 3,473 miles. The boat is doing a lot of course correction (searching) according to the tracking maps. We do not know if this is because of any directional instability in the hull design from wave encounters, or maybe the algorithm for the steering is not frequent enough to steer a true course - possibly due to power saving, computing speeds or satcoms intervals. Who knows? We doubt computing speeds with dual Arduinos. Ultimately, the Scout's systems will be working harder at this size than on say, a 100 footer. The longer a boat, the easier it is to steer a straight course.
By climbing and surfing waves, the effective course length is increased. The zig, zag headings are also increasing the effective course length. It is no wonder then that all of the small scale autonomous Atlantic attempts so far have come a cropper.
POWER CALCS - Guessing about the panels from pictures, it looks like they have about 1.6 m2 of panel area, that should provide around 230watts @ 17% efficiency. Then at 140lbs, the power to weight ratio is 3.7kW/ton. Or @ 200watts that is 3.2kW/ton. Either way that is three times the power to weight ratio of PlanetSolar, which manages 5 knots from its two canoe shaped hulls (shape presented to the sea) at under 1kW/ton using a large battery to even out loads for overnight running, etc. Size matters, but we must conclude that the motor/propeller setup on the Scout is far from ideal in converting electrical energy to thrust, and of course that long fin generates quite a bit of resistance from its surface area - but is a necessary evil. The design is though solid and light for which the team builders must be rightly proud. [We've just heard that Scout has two 65w panels, 1 30w panel, and 1 55w panel giving 215 watts overall]
The estimates for hull speed were between 2-4 mph. The average speed (geographic distance) at time of writing is 1.96 (14-09-2013) miles per hour, up from the previous 1.75 miles per hour. If Scout can keep that up she will complete her mission in 83 days. A speed of 1.8 mph will reduce that to 80.4 days and 1.85 mph will take the journey down to 78 days. So, conservatively, were looking at a record crossing in the region of 80-90 days. PlanetSolar did a shorter route in 22 days in August 2013 with a more efficient hull/propulsion setup, but that boat is manned. Mind you, if PlanetSolar were to be fitted with robotic navigation equipment, it would trounce a small boat like Scout. It is though, 'first-come-first-served' and Scout is the autonomous record holder.
TELEMETRY - Telemetry information is relayed via Iridium 9612 every hour. Scout uses two Arduino micro computers; one to navigate and one to communicate via an Iridium transceiver. Dylan and Ryan worked on programming and electronics. We are not sure if Scout has a compass onboard. If not, that might help improve course keeping in between gps signaling delays, something that Robin Lovelock was considering for his Snoopy Sloop. The base programming for Scout took 14 days with both engineers working for 15 hours a day while imbibing a serious quantity of energy drinks. Stay off the sauce lads :)
Old and New - PlanetSolar docked alongside a traditional sailing boat. Imagine what the Scout team could do with a boat this size!
In May of 2012, the PlanetSolar completed the first solar powered circumnavigation. At about that time a world autonomous navigation was proposed by the SolarNavigator team, also using a solar powered platform. Then in August 2013 PlanetSolar set the fastest solar record across the Atlantic, at 22 days.
Now, these guys are developing the same theme on a micro budget, sowing the building blocks for what is bound to happen eventually, but not without some serious effort on the part of those involved. Scout is a truly inspired project, with young engineering pioneers leading the way - despite all the usual glitches and gremlins.
Scout was launched on August 24 and the small craft has already smashed the record for distance traveled by an autonomous transatlantic vessel. They beat a previous record of about 60 miles set by a team from Aberystwyth University in the 2010 Microtransat Challenge.
It all started back in 2010 when a group of college students started working on an unmanned robotic motor boat that could cross the Atlantic from Rhode Island to Spain. They wanted to go one better than Roboboat, because a robotic boat that motors around a pond or lake is cool, but a boat that can cross the ocean is an inspiration to everyone, extending the challenge out onto open water. Roboboats (the competition), is more to do with battery powered robot boats avoiding obstacles. They are not concerned with autonomy - as in the energy to move the vessel, simply collision avoidance - and improving that ability on a low budget, which is of course commendable.
THE CREW
KICKSTARTER PROJECT
BEGINNING
FUNDING PERIOD: Mar 30, 2011 - May 9, 2011 (40 days) - RESULT: 73
Backers contributed $3,424
THE KICKSTARTER DEALS
Pledge $5 or more
- 13 backers Pledge $10 or more
- 5 backers
Pledge $25 or more
- 0 backers
Pledge $50 or more
- 6 backers Pledge $70 or more
- 1 backer Pledge $100 or more
- 13 backers
INDIVIDUAL CONTRIBUTORS
Jamestown Distributors: Go Scout! 800 mile autonomous record celebration.
NAVIGATION
They tried to design around every risk they could imagine. Where many teams would use an off the shelf hull, they designed their own to be strong, reinforced with several sturdy bulkheads. A weighted keel will right the boat if it should capsize at some cost in drag terms. The boat is as water tight as they could make it, but it is also equipped with bilge pumps.
They maximized the number of solar panels
for a mono-hull by removing the aluminum frames and tilted the deck to face south
to harness more of the sun's energy. When power is low, Scout enters a low power drift mode to save batteries.
One Arduino Mega microcontroller
is devoted to navigation, and a second Mega handles sensors and communications through
the Iridium satellite transceiver. The software is reset every 12 hours to avoid pesky memory leaks or corruption from long term use. Why
though does that happen?
SOLAR VOYAGER - Two hefty PV panels are low in the water so will get a dousing routinely, but should stay clean enough for the crossing. This has not been a problem for the Autonaut. The concept is similar to the SeaCharger below and the Scout seen on this page, but that the Scout attempted to set the Atlantic unmanned record in 2013, whereas the Solar Voyager made her attempt in 2016.
SEACHARGER SOLAR BOAT - Being recovered by a passing ship at sea, this boat is very similar in concept to the Solar Voyager above but attempted to travel across the Pacific to set a record for unmanned endurance boats in 2017. The SeaCharger made it from California to Hawaii, but came a cropper near to New Zealand. Valliant attempts all and there is always room for one more....
COLLISION
AVOIDANCE - When asked about the legal aspect of COLREGs
the Scout team quoted from the Microtransat.org website: Q: Do the boats have to include any kind of autonomous collision-avoidance system to prevent collision with other floating objects?
The above
echoes their thinking for this project. They say that no collision avoidance system would be feasible for
them to use, and the tiny chances of encountering another vessel make this something that
they don't need to worry about, presumably because at 13 feet and 140 pounds,
the vessel presents to real danger to other boats, that would just brush Scout
aside.
Scout Video
LINKS
http://en.wikipedia.org/wiki/Scout_%28autonomous_boat%29 https://twitter.com/ScoutTRANSAT https://www.facebook.com/ScoutTransatlantic http://www.wpri.com/on-air/green-team/ri-students-design-solar-powered-boat http://www.solarracing.org/2013/06/10/autonomous-solar-powered-boat-to-cross-the-atlantic/ http://letsmakerobots.com/node/38270 http://propercourse.blogspot.co.uk/2013/06/scout-autonomous-transatlantic-boat.html http://www.kickstarter.com/projects/601285608/scout-the-autonomous-transatlantic-boat http://www.kickstarter.com/help/school#defining_your_project http://www.kickstarter.com/start?ref=footer http://www.gotransat.com/ http://www.gotransat.com/tracking/ http://makezine.com/magazine/transatlantic-drone-takes-to-the-sea/ http://www.behance.net/gallery/SCOUT-Transatlantic/10153015 The
Microtransat Challenge: www.microtransat.org The
Microtransat Challenge for competition details SPOT
Track from the Mail
Online World
Sea
conditions, Temperatures
& Sunshine http://www.yellowbrick-tracking.com/ http://fishpi.org/wiki/index.php?title=The_Proof-Of-Concept_Vehicle http://fishpi.org/wiki/index.php?title=The_Prototype http://fishpi.org/wiki/index.php?title=Hull_Design http://www.raspberrypi.org/ http://international.findmespot.com/ http://www.amsat.org/ Scout autonomous transatlantic boat Pete Danko (July 10, 2013). "'Scout,' Robotic Solar Boat, On Transatlantic Voyage Thanks To Group Of College Students". The Huffington Post. Bruce Burdett (June 4, 2013). "From Tiverton — A slow boat to Spain". EastBayRI. Richard Salit (July 10, 2013). "Student designers end boat's second bid to cross from RI to Spain". The Providence Journal. Richard Salit (August 24, 2013). "Autonomous vessel Scout makes 3rd transatlantic bid". The Providence Journal. "Students build unmanned boat that's crossing the Atlantic right now". MSN. August 31, 2013. Richard Salit (June 2, 2013). "R.I. sailing buddies build solar-powered robot boat for trip to Spain". The Providence Journal. "The Build". goscout.com. http://www.engineering.com/DesignerEdge/DesignerEdgeArticles/ArticleID/6400/Robotic-Boat-Attempts-Atlantic-Crossing.aspx Engineering Robotic-Boat Attempts Atlantic Crossing http://spectrum.ieee.org/automaton/robotics/diy/robotic-boat-hits-1000-mile-makr-in-transatlantic-crossing
Learn about the basics of boat design using the links below - and enjoy experimenting yourself.
Blackcurrant 1 | Blackcurrant 2 | Catamaran | Hull Design | Drag | SWASH | SWATH | Trimaran
OCEAN LINKS
ACIDIFICATION - ADRIATIC - ARCTIC - ATLANTIC - BALTIC - BERING - CARIBBEAN - CORAL - EAST CHINA ENGLISH CH - GOC - GULF MEXICO - INDIAN - MEDITERRANEAN - NORTH SEA - PACIFIC - PERSIAN GULF - SEA JAPAN STH
CHINA - PLASTIC
- PLANKTON - PLASTIC
OCEANS - SEA
LEVEL RISE
RECON - Could this be the new Scout for 2015 or 2016? We'll just have to wait and see. Fingers crossed that the chaps manage to secure funding for their latest solar powered boat design.
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
This website is Copyright © 2017 Bluebird Marine Systems Ltd. The names AmphiMax™, Bluebird™, Bluefish™, SeaVax™ and the blue bird and fish in flight logos are trademarks. The color blue is an essential element of the marks. All other trademarks are hereby acknowledged.
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||