|
The autonomous vehicle—a vehicle capable of driving itself without any human intervention—is quickly becoming a reality. True driverless vehicles are able to "think" like a human driver, and possess the ability to make decisions in real-time, including obeying traffic laws, avoiding obstacles and other vehicles, as well as planning and navigating traffic routes.
The researchers at VisLab, a spin-off company of the University in Parma, Italy that specializes in vehicular applications involving both environmental perception and intelligent control, developed a prototype vehicle called BRAiVE (short for BRAin-drIVE). The off-the-shelf car is equipped with various sensing technologies for perception, navigation and control. The perception system is mainly based on vision, together with four laser scanners, sixteen laser beams, GPS, an Inertial Measurement Unit (IMU) and full X-by-wire for autonomous driving. Ten cameras are used to detect information on the surroundings of the vehicle. The images are processed in real-time, together with information from the navigation system, to produce the necessary signals for steering and gas intake.
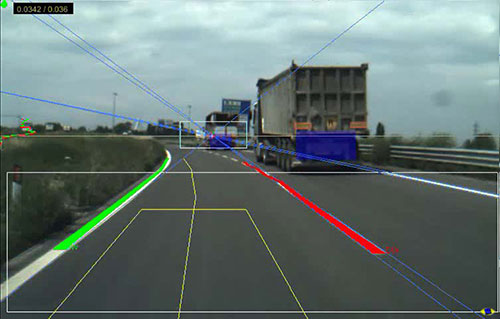
Fig1
Front Detection
FIGURE 1. The cameras assist in front obstacle detection, intersection estimation, parking space detection, blind spot monitoring and rear obstacle detection
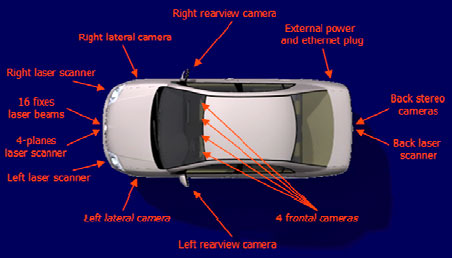
Four Point Grey Dragonfly2's are mounted behind the upper part of the windshield, two with color sensors and two with mono sensors. These cameras are used for forward obstacle/vehicle detection, lane detection and traffic sign recognition. Two Dragonfly2’s are mounted over the front mudguards, behind the body of the car looking sideways, and are used for parking and traffic intersection detection. An additional two Firefly MV’s are integrated into the rearview mirror to detect overtaking vehicles, and another two Dragonfly2’s monitor nearby obstacles during driving.
Images are acquired from the cameras via external trigger or in free-running mode, depending on the situation, using Format 7 Mode 0 (region of interest mode). The raw Bayer data is color processed on-board the cameras, then streamed at S400 speed over the FireWire interface to the vision system. Stereo algorithms are then used to reconstruct the 3D environment, and provide information about the immediate surroundings.
“We selected Point Grey cameras for a number of reasons, most notably their outstanding image quality, the ability to control parameters such as shutter, gain, and white balance with custom algorithms, and the compatibility with ultra-compact M12 microlens mounts, which have played a key role,” explains Dr. Alberto Broggi, Director of VisLab. Paolo Grisleri, responsible for vehicle integration, adds, “The camera size for integration in the rearview mirrors, availability of third-party software for Linux, as well as good price/performance were other significant factors in our decision.”
Fig
2 Cameras and Lasers
FIGURE 2. The vehicle uses Dragonfly2s and Firefly MVs
The intelligent capabilities BRAiVE features include crossing assistance, obstacle and pedestrian detection, parking assistance, road sign detection, and lane markings, as well as stop & go and automatic cruise control. All sensors, actuation and control devices are perfectly integrated, giving passengers the feeling of riding in a normal car. BRAiVE was first presented to the press in a public demonstration on April 3rd, 2009 in Parma, Italy and presented at the 2009 IEEE Intelligent Vehicles Symposium in Xi’an, China.
“Artificial vision is a promising technology for cars, trucks, road construction, mining vehicles and indeed military vehicles, thanks to the low cost and great capabilities that vision sensors are currently demonstrating,” adds Paolo Grisleri. He is confident that the technology embedded in this vehicle will constitute the basis for developing innovative concepts for the car industry and full vehicle autonomy in the next few years.
LINKS
& REFERENCE
http://www.nap.edu/catalog/11379.html
http://www.ptgrey.com/news/casestudies/details.asp?articleID=342
ACRONYMS
& ABBREVIATIONS A-Z
ACOMMS acoustic communications systems
ACTD Advanced Concept Technology Demonstration
AEHF advanced extremely high frequency
AGV automated guided vehicle
AINS Autonomous Intelligent Network and Systems (initiative)
ANS Autonomous Navigation System
ARPA Advanced Research Projects Agency
ARTS All Purpose Remote Transport System
ATD Advanced Technology Demonstration
AV autonomous vehicl
C2 command and control
C2S Command and Control System
C2V command and control vehicle
C3 command, control, and communications
C3I command, control, communications, and intelligence
C4 command, control, communications, and computers
C4I command, control, communications, computers, and intelligence
CDL common data link
CECOM Communications Electronics Command
CHBDL common high-bandwidth data link
COMINT communications intelligence
CONOPS concept(s) of operations
COTS commercial off-the-shelf
CSP constraint satisfaction problem
CTFF Cell Transfer Frame Format
CWSP Commercial Wideband Satellite Program
DARPA Defense Advanced Research Projects Agency
DOT Department of Transport
EHF extremely high frequency
ELINT electronic intelligence
EM/EO electromagnetic/electro-optical
EMS electromagnetic sensing
EO/IR electro-optical/infrared
FDI fault detection and isolation
FDOA frequency difference of arrival
FMEA failure modes and effects analysis
FOC final operational capability
Gbps gigabits per second
GBS Global Broadcast System
GEOS Geosynchronous Earth Orbit Satellite
GHz gigahertz
GIG Global Information Grid
GIG-BE Global Information Grid-Bandwidth Expansion
GIG-E Globat Information Grid-Expansion
GPS Global Positioning System
HAE high-altitude and -endurance
HALE high-altitude, long-endurance
HDTV high-definition television
HMMWV high mobility multipurpose wheeled vehicle
IMINT imagery intelligence
IMU inertial measurement unit
IOC initial operating capability
IP Internet Protocol
IR infrared
JPO Joint Program Office
JSTARS Joint Surveillance Target Attack Radar System
kbps kilobits per second
LADAR laser detection and ranging
L/D lift to drag (ratio)
LD MRUUV large-diameter multi-reconfigurable UUV
LDR low data rate
LEOS Low Earth Orbiting Satellite
LIDAR light detection and ranging
LOA level of autonomy
LOS line of sight
LRIP low-rate initial production
MAE medium-altitude and -endurance
MARS Mobile Autonomous Robot Software
MCG&I mapping, charting, geodesy,and imagery
MDARS-E/I Mobile Detection Assessment Response System-Exterior/Interior
MDR medium data rate
MICA Mixed Initiative Control of Automa-teams (program)
MMS Mission Management System
MPM mission payload module
MP-RTIP Multi-Platform Radar Technology Insertion Program
MRD Maritime Reconnaissance Demonstration (program)
MRUUV multi-reconfigurable UUV
MTI moving target indicator
MULE multifunction utility logistics equipment (vehicle)
NBC nuclear, biological, and chemical
NII Networks and Information Integration
NMRS Near-term Mine Reconnaissance System
NRC National Research Council
NRO National Reconnaissance Office
O&S operations and support
OCU operator control unit
ODIS Omni-Directional Inspection System
OODA observe-orient-decide-act
OTH over-the-horizon
PEO Program Executive Office
Perceptor Perception for Offroad Robotics
PMS Program Management Office
QDR Quadrennial Defense Review
R&D research and development
REMUS Remote Environmental Monitoring Unit System
RF radio frequency
RHIB rigid hull inflatable boat
RMP Radar Modernization Program
RONS Remote Ordnance Neutralization System
ROV remotely operated vehicle
RTIP Radar Technology Improvement Program
S&T science and technology
SA situation awareness
SAR synthetic aperture radar
SAS synthetic aperture sonar
SATCOM satellite communications
SDD System Development and Demonstration
SDR Software for Distributed Robotics
SFC specific fuel consumption
SHF superhigh frequency
SIGINT signal intelligence
SIPRNET Secret Internet Protocol Router Network
SLAM simultaneous localization and mapping
SOC Special Operations-Capable
SRS Standardized Robotics System
TALON one robot solution to a variety of mission requirements
TAR tactical autonomous robot
TCA Transformational Communications Architecture
TCDL tactical common data link
TCO Transformational Communications Office
TCP Transmission Control Protocol
TCS Tactical Control System
TDOA time difference of arrival
TPED task, process, exploit, disseminate
TPPU task, post, process, use
TRL Technology Readiness Level
TUAV tactical unmanned aerial vehicle
UCS Unmanned Control System
UGCV Unmanned Ground Combat Vehicle (program)
UGS unattended ground sensor
UGV unmanned ground vehicle
UHF ultrahigh frequency
VHF very high frequency
VMS Vehicle Management System
WNW wideband network wave form
XUV experimental unmanned vehicle
The
key to accurate hydrographic mapping is continuous monitoring,
for which the SNAV
platform, presently under development, is a robotic ocean workhorse. Based on a stable
SWASH
hull this design is under development by a consortium of British
engineers. The robot
ship uses no diesel fuel to monitor the oceans autonomously (COLREGS
compliant) at relatively high
speed 24/7 and 365 days a year - only possible with the revolutionary (patent) energy harvesting system. The
hullform is ideal for automatic release and recovery of ROVs
or towed arrays, alternating between drone and fully autonomous modes.
UK and international development partners are welcome. This vessel
pays for itself in fuel saved every ten years.
|