|

FishPi
is a project to use the Raspberry Pi (RPi) bare bones low-cost educational computer, to guide & control an autonomous solar powered surface vehicle.
Should the team succeed, we would class the vessel as a robot.

The
hull, motor & gearbox, kort nozzle & propeller, propshaft, couplings and
rudder servo.
PROOF
of CONCEPT VEHICLE (POCV) The POCV's purpose is to demonstrate that the Raspberry Pi can support the multiple systems needed to maintain long-term autonomous operations on water.
The POCV will be battery powered, and only run the bare essentials needed to navigate the craft on a small body of water, a lake for example. The RPi will be tasked with running the Electronic Speed Controller (ESC) which in turn manages the electric motor, taking GPS positioning information and combining that with waypoint and route information to calculate the rudder commands to navigate the POCV to predetermined locations, and take photographs and or video during its test missions.
A base-station complete with LCD, keyboard, mouse, USB hub, and an extension for the network port will be used with the POCV.
The Hardware List for the POCV:
Command & Control: Raspberry Pi.
Battery Pack: Six 5000mAH 1.2 Volt NiMH SubC cells.
Hull: Models By Design Cygnus DS25.
GPS: Navigatron v2 - i²c GPS.
Power Regulation: Flytron 3.3v & 5v Tiny Regulators.
Ancillaries: Adafruit 16-Channel 12-bit PWM/Servo Driver - i²c interface - PCA9685.
Rudder: JR NES-505 Servo.
Compass: CMPS10 - Tilt Compensated Compass Module.
Electronic Speed Controller: Mtronics MicroViper Marine10.
Motor: MFA 919D 540 Motor With Attached Single Ratio Metal Gearbox 2.5:1.
Propulsion: Raboesch Brass 4 Bladed Kort Propeller RH A-Type Blades (40mm Diameter M4 Thread).
Propshaft: Raboesch Waterproof Propshaft (186mm M4 Thread).
Webcam: Kinobo 5 Megapixel USB Webcam .
Wifi: TP-Link TL-WN722NC USB Wifi Dongle .
Satellite Comms: RockBLOCK Two-Way Satellite Communicator .
The Hardware List for the Base-Station:
17" LCD panel & Logic Board.
Multi-port USB Hub.
Keyboard with integrated track-pad.
DC-DC Converter.
USB & CAT5e Extension Sockets.
512mb Raspberry Pi.
8gb SD Card.
4-Port Wifi Router.

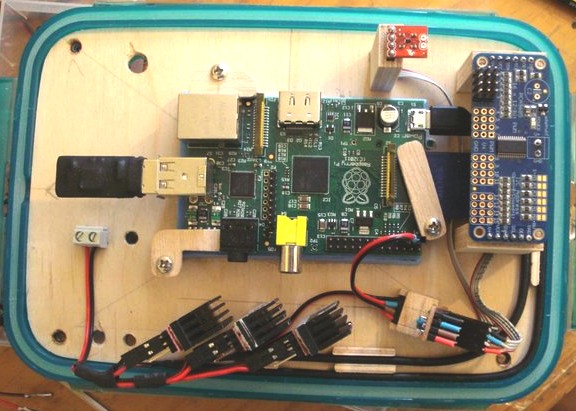
Not
exactly design poetry, but a practical test model
ONBOARD POWER SYSTEMS
The POCV's power comes from a pack of six 5000mAH 1.2v SubC cells. Combined they give a total output of 7.2v at 5AH, this should give an approximate run-time of two hours for the POCV. The battery pack is charged from either a mains-supplied 1000mAH charger, or a 1, 2, or 4AH 12v DC car charger. Power to the Raspberry Pi comes from the Raspy Juice expansion board. The Raspy Juice provides a regulated +5v supply in the Raspberry Pi's GPIO header. Before the Raspy Juice power came from a single Low-Dropout Regulator (LDO). The LDO converted the 7.2v from the batteries to the 5v needed by the Raspberry Pi. The LDO was mounted on a passive cooling plate as heat is generated by the LDO when lowering the 7.2v input from the batteries to the 5v output for the Raspberry Pi. An +3.3v LDO still provides power to the i²c rails, and a +5v LDO feeds into the Adafruit 16 Channel PWM to power the servo(s).
THE BASE STATION
An aluminum flight-case has been fitted with a 17" LCD, 512mb Raspberry Pi, 4-Port Wifi Router, a 12v to 5v DC-DC Converter, a 7-port USB hub, an external socket for USB & a CAT5e Network Port, and finally a Sejin SPR-8695TU keyboard with integrated trackball. The Base-Station will draw power from either a direct 12v feed from a car battery, or from a 12v 5amp mains power supply. The base-Station is designed with mobility and ease-of-access in mind. Using the umbilical cord a quick connection to the POCV will connect all the required peripherals to operate the POCV's onboard Raspberry Pi. The Base-Station will not contain any batteries nor will it be used to charge the POCV.
Getting
your ideas down in draft form, helps to crystallize the concept - several drafts
will be needed.
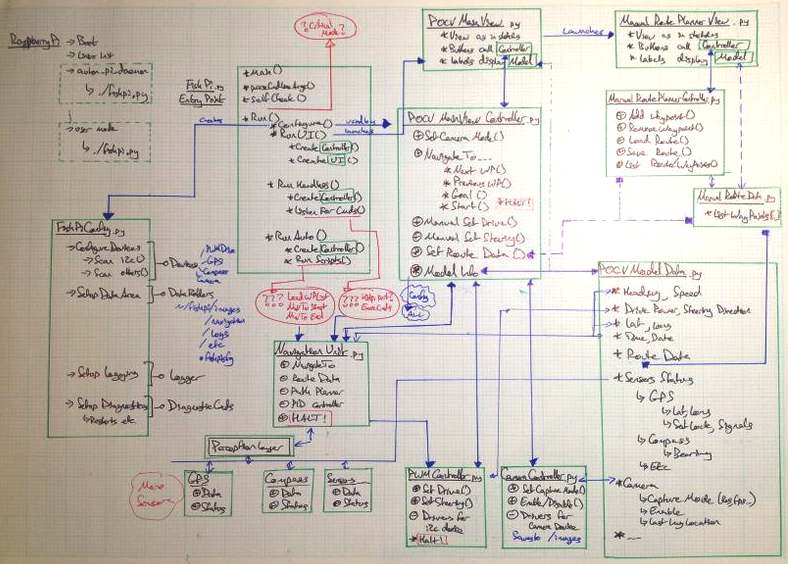
SOFTWARE
All control software for the FishPi will run on the RaspberryPi.
FishPi will be using Python as its language of choice. Liam Fraser has an excellent series of tutorials demonstrating the Raspberry Pi and how to program on it using Python. His YouTube channel is RaspberryPiTutorials
The i²c device addresses are:
0x20 Navigatron GPS.
0x29 Raspy Juice Image Loader.
0x32 Raspy Juice AVRmega168A.
0x40 Adafuit PWM.
0x48 Temperature sensor.
0x60 Compass.
0x68 Raspy Juice NXP PCF8523 Real-Time Clock.
0x70 Adafruit PWM.
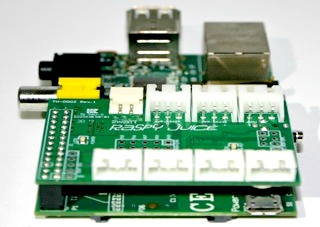
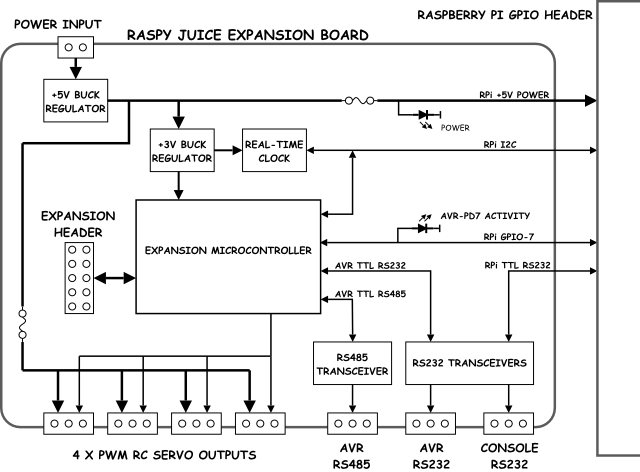
The
Raspberry Juice, expansion board - for simple robotics. The key is keeping it as
simple as possible RASPBERRY
JUICE EXPANSION BOARD The Raspy Juice Expansion Board is a compact piggyback PCB board that power supply the required and regulated +5V to the RPi from a wide range of voltage sources, provides an RS232-level console breakout port and a real-time clock. The secondary feature of Raspy Juice is its expansion ATmega168A microcontroller that has interfaces of an RS485 port, an additional RS232 port, 4x RC servo ports, and an expansion pins header for the MCU. This microcontroller and its interfaces are for simple robotics and other interfacing experiments. 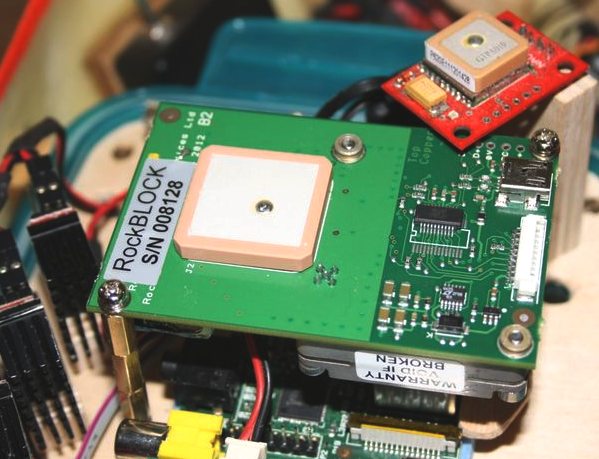
Affordable
satellite communications, the RockBLOCK Iridium transceiver ROCKBLOCK The RockBLOCK allows you to send and receive short messages from anywhere on Earth with a clear view of the sky. It works far beyond the reach of WiFi and GSM networks. It works on the top of Mount Everest. It works in the middle of the Sahara Desert. It works at the North Pole. And the South Pole too. It works in the middle of any Ocean.
Maybe you want to transmit weather information from mid-ocean? Or use it to control your robot in the middle of the desert? Perhaps you need to communicate in an emergency, when other networks might not be available?
RockBLOCK uses the Iridium Satellite network. Specifically, it uses an Iridium service called ‘Short Burst Data’ (SBD),
to among other issues, keep costs containable.
At the heart of RockBLOCK is an Iridium 9602 modem. The RockBLOCK hosts the 9602 and provides it with an antenna, and its power supply requirements. It exposes the modem’s serial interface via USB (or directly – PCB assembly version only).
Rock 7 Mobile
Unit 2, Eastlands Boatyard
Coal Park Lane, Swanwick
Southampton, SO31 7GW
United Kingdom
Tel: 0845 619 8252 Email: info@rock7mobile.com 
The
troublesome Origami camera CAMERA
ISSUE The USB Webcam was problematic. The best we could get from it was 320 x 240, and that was at a frame rate of about 3 a second, on a good day. The obvious thing to do was replace it with the new Raspberry Pi Camera.
The camera comes with a length of flexible flat cable. This is great for on-the-desk stuff, but not very practical for the POCV. Firstly its not long enough, secondly it is only flexible in on plane, and thirdly it is hard to connect to without the correct ZIF socket.
The solution is the AlienSpec CSI DSI Ribbon Connector GPIO Breakout Board which I found browsing eBay.
Using two AlienSpec boards, and a length of screened 15-Core cable I should be able to connected the Raspberry Pi camera to the POCV.
Out of curiosity I checked the size of the Raspberry Pi camera against the Kinobo Origami Webcam, and by sheer coincidence they are just about the right size for each other. With a bit of modification I should be able to fit the Raspi cam inside the Kinobo cam! 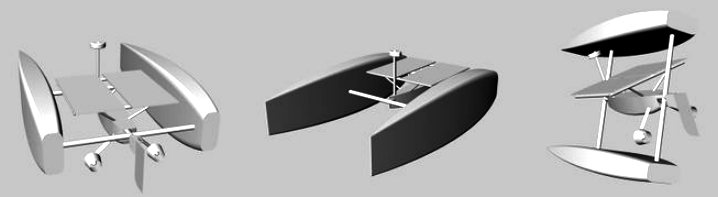
Nice
CAD drawings of a proposed ocean going design THE
PROTOTYPE The Prototype FishPi will be
an ocean-going model. Whereas the The Proof-Of-Concept Vehicle (POCV) is destined for lakes the Prototype will go to sea. The Prototype will also feature a solar panel in addition to batteries.
Features, Functions, & Concepts - The Prototype is expected to run on a core system of;
Raspberry Pi - The Raspi will handle all command & control functions. Including navigation, power management, device control, & data logging.
Batteries - Electronics, including the propulsion system will run from battery. We expect to use a Lithium-ion polymer cell pack.
Solar Power - The batteries will be charged from an onboard solar panel.
Drive System - Propulsion is expected to feature a ducted Kort propeller as their design is well suited to low speed and high thrust applications.
Communications & Telemetry - Ship-To-Shore communication via satellite. One of the project's aims is to be able to transmit images back from the FishPi.
The Raspberry Pi is a single-board computer developed in the UK by the Raspberry Pi Foundation with the intention of stimulating the teaching of basic computer science in schools. The
Raspberry Pi has a Broadcom BCM2835 system on a chip (SoC),[3] which includes an ARM1176JZF-S 700 MHz processor, VideoCore IV GPU,[9] and 256 megabytes of RAM. It does not include a built-in hard disk or solid-state drive, but uses an SD card for booting and long-term storage.
Lithium-ion polymer batteries, polymer lithium ion, or more commonly lithium polymer batteries (abbreviated Li-poly, Li-Pol, LiPo, LIP, PLI or LiP) are rechargeable (secondary cell) batteries. LiPo batteries are usually composed of several identical secondary cells in parallel to increase the discharge current capability, and are often available in series "packs" to increase the total available voltage. This type has technologically evolved from lithium-ion batteries. The primary difference is that the lithium-salt electrolyte is not held in an organic solvent but in a solid polymer composite such as polyethylene oxide or polyacrylonitrile. The advantages of Li-ion polymer over the lithium-ion design include potentially lower cost of manufacture, adaptability to a wide variety of packaging shapes, reliability, and ruggedness.
Solar power is the conversion of sunlight into electricity, either directly using photovoltaics (PV), or indirectly using concentrated solar power (CSP). Concentrated solar power systems use lenses or mirrors and tracking systems to focus a large area of sunlight into a small beam. Photovoltaics convert light into electric current using the photoelectric effect. Commercial concentrated solar power plants were first developed in the 1980s. The 354 MW SEGS CSP installation is the largest solar power plant in the world, located in the Mojave Desert of California. Other large CSP plants include the Solnova Solar Power Station (150 MW) and the Andasol solar power station (150 MW), both in Spain. The 214 MW Charanka Solar Park in India, is the world’s largest photovoltaic plant.
A ducted propeller, also known as a Kort nozzle, is a propeller fitted with a non-rotating nozzle. It is used to improve the efficiency of the propeller and are especially used on heavily loaded propellers or propellers with limited diameter. It was developed by Luigi Stipa (1931) and Ludwig Kort (1934). The Kort nozzle is a shrouded, propeller assembly for marine propulsion. The hydrodynamic design of the shroud, which is shaped like a foil, offers advantages for certain conditions over bare propellers. Advantages are increased efficiency, better course stability and less vulnerability to debris. Downsides are reduced efficiency and course stability when sailing astern and increase of cavitation. Ducted propellers are also used to replace rudders.
A communications satellite (or COMSAT) is an artificial satellite stationed in space for the purpose of telecommunications. Modern communications satellites use a variety of orbits including geostationary orbits, Molniya orbits, other elliptical orbits and low (polar and non-polar) Earth orbits. For fixed (point-to-point) services, communications satellites provide a microwave radio relay technology complementary to that of communication cables. They are also used for mobile applications such as communications to ships, vehicles, planes and hand-held terminals, and for TV and radio broadcasting, for which application of other technologies, such as cable television, is impractical or impossible.

A
submarine proposal for the ocean going prototype
In The Beginning - Design Principles
What do we want The Prototype to do, and how do we want it to do it?
Autonomous Navigation.
The FishPi must be able to operate at sea completely independently. The Raspberry Pi will use multiple devices to navigate the seas.
Solar Power.
FishPi will use a solar panel to charge batteries onboard. These will then be used to power the vessels drive systems, and any command & control modules.
Monitor The Surroundings.
There are a considerable amount of possibilities when it comes to environmental monitoring. Some of the options include; air & sea temperature, light monitoring, sea salinity, Ph levels, hydrophones, imagery, barometric monitoring, and many more. Some of the data could be relayed real-time using telemetry.
Satellite Telemetry.
The use of an independant basic telemetry system would be a huge advantage if a complete system failure occures. Having an independant system which can report basic positioning information, and if possible enviromental information back to the controller without input from the Command & Control systems inside the FishPi. In the event that the battery power is exhausted tracking will still function. Two-way communication opens up real-time course correction, disater avoidance, and most importantly the ability to turn functions on & off, and perform preprogrammed tasks on command.
Images Over The Amateur Radio Satellite Network.
Transmitting recent images captured aboard the FishPi using the Amsat network. A system like this would be able to broadcast images to anyone who has an antenna, a receiver, and a computer able to decode the signals.
A receiver station can be acheived with relativley little expense, in fact at UK Amsat there is a USB receiver capable of receiving transmissions, maybe even on a Raspberry Pi (link).
Hardware List
Command & Control - Raspberry Pi
Real-Time Telemetry - yellowbrick | Spot Messenger
Image Proliferation - Amateur Radio Satellite
The Hull - Autoclaved Carbon Fibre
Solar Panel - Enecom HF 130
SUPPORTERS
Jason Ramey | J G Stewart | David Hertzog | John L. Wolfley | Zak Zebrowski | James Holloway | Trystan Wyn Davies | Eliot Gillum | Cristian Cuevas Caballé | Félix Delval | Janne Siren | Samuel Brière | Matt Curzon | Ozgur Ozdemircili | Mael Flament | Ihsan Utku Tugrul | Joshua Griffiths
CONTACTS Email:
greg.holloway@fishpi.org
This
little computer makes it all happen - the Raspberry Pi
LINKS
http://www.python.org/
http://www.youtube.com/user/RaspberryPiTutorials
http://fishpi.org/contact.html
http://fishpi.org/forum/
http://www.raspberrypi.org/
http://rockblock.rock7mobile.com/
http://www.oceanbusiness.com/
https://code.google.com/p/raspy-juice/
http://www.yellowbrick-tracking.com/
http://fishpi.org/wiki/index.php?title=The_Proof-Of-Concept_Vehicle
http://fishpi.org/wiki/index.php?title=The_Prototype
http://fishpi.org/wiki/index.php?title=Hull_Design
http://www.modelsbydesign.co.uk/
http://www.raspberrypi.org/
http://international.findmespot.com/
http://www.amsat.org/
http://en.wikipedia.org/wiki/Composite_material#Autoclave_moulding
http://www.enecomitalia.com/ENG/caravans.html
|