|
Following
on from the Scout Atlantic bash in 2013, in 2020, a team comprising Promare,
IBM,
and many other technology partners, decided to attempt to cross the Atlantic
against the prevailing winds and currents. They set out to build a 100ft craft
named Mayflower Autonomous Ship (MAS) for launch and an attempt, aiming for the
400th anniversary of the Pilgrim Fathers journey starting on the 6th of
September 1620.
They
never made that date, partly due to Covid
19, but did manage to get a hull in the water for the ceremonies in Plymouth,
Devon in 2020. On the 15th June 2021, the unmanned craft departed from Plymouth
in England, aiming for Plymouth, Massachusetts, USA. You can follow the journey
on their blog: https://mas400.com/dashboard

MAS
400 - The fully autonomous trimaran Setting off from Plymouth, England on the
15th June 2021. There are solar panels, that presumably add to the
diesel-electric setup. The idea is to be COLREGs
compliant with a self learning program, as such vessels build a database. Much
the same as with the current bevy of self-driving robotaxis
and robotracks.
The question is therefore, will ships beat trucks to the autonomous
punch?

THE
TEAM: Dylan Rodriguez, Dan Flanigan, Max Kramers, Ken Muller, Brendan Prior, Mike Flanigan, David Pimental
15
DAY UPDATE - Unfortunately, we don't have the statistics for day 15 - day 17
(Set 10) is include below. 10 SEPTEMBER 2013
STATISTICS:
Time Elapsed: 17 DAYS: 02 HOURS: 41 MINUTES: 48 SECONDS
Distance from Rhode Island 512.66 MI
Distance to Spain 2908 MI
Distance
traveled by Scout 765.72 M Velocity 2.3 MI HR
CURRENT STATUS: N 42° 2’ 27.67” W 61° 17’ 16.66” Compass 96° Waypoint 97° CoG
69°
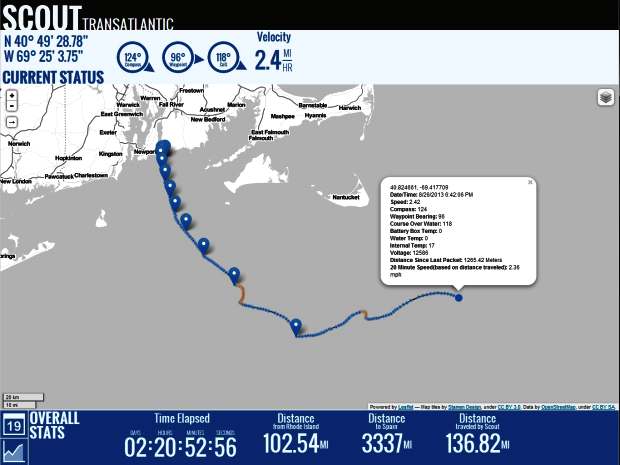
Click
on the image above to follow progress live
Scout passed the 15 day barrier with flying colors. For all the latest news,
make sure to visit the website at www.GoTransat.com SPECTRUM
IEEE 27 September 2013 - Robotic Boat Hits 1000-Mile Mark in Transatlantic Crossing
“Scout,” a 4-meter-long autonomous boat built by a group of young DIYers, is attempting to cross the Atlantic Ocean. It is traveling
from Rhode Island, where it launched on 24 August, to Spain, where all being well it will arrive in a few months’ time.
Scout has now gone about 1000 miles (1600 kilometers) of its planned 3700-mile (5900 kilometer) journey. Should it complete this voyage
successfully, its passage will arguably belong in the history books.
I say “arguably,” because it won’t be the first time a robotic vessel has crossed the Atlantic: Scarlet Knight, a sea-going robot
fielded by researchers at Rutgers University, did that in 2009. But Scout stands to beat out Scarlet in my mind, for several reasons.
You see, Scout would be the first robotic surface vessel to make this crossing. Scarlet was what is known as an oceanographic glider,
which porpoises up and down, spending most of the time at significant depth.
Okay, maybe the distinction between a surface vessel and an oceanographic glider is too fine for the typical landlubbing
roboticist to care about. But there are other reasons to disqualify Scarlet from the record book of autonomous Atlantic Ocean crossings.
For one, Scarlet was launched from a ship about 50 miles offshore of
New Jersey. And it was recovered by another ship far offshore from Spain. So it didn’t really make a
continent-to-continent voyage at all.
If this sounds like a trivial point, then you’ve probably not done much blue-water sailing. Out in the middle of the ocean, there’s not
much to hit. Close to shore, however, you’re in the shipping lanes, fishing boats are zigzagging around deploying nets or hauling them
in, and recreational traffic increases enormously. If you’re sailing into a busy port, it can feel like you’re dodging giants in the
final hours. So the fact that Scarlet didn’t have to endure the most risky parts of a transatlantic journey is significant.
If that’s not good enough for you, consider this: Scarlet could be remotely controlled. Indeed, soon after Scarlet put to sea, it
became clear that there was a problem, one that was corrected by uploading some new parameters by radio. (Spectrum’s coverage of
Scarlet describes this episode.) Now how autonomous is that?
Also, Scarlet required a pit stop. Off the Azores, technicians from Rutgers caught up with Scarlet to scrape barnacles off its hull.
They did that in the water rather bringing it aboard ship. So technically, the glider’s journey was uninterrupted. Technically.
Scout is shooting for a transatlantic record under a different set of rules. It was carried off the beach and into the water by two
guys on their backs—and only far enough out so that it’s keel would clear the bottom. Scout sends telemetry updates three times an hour
using an Iridium transmitter, but no new instructions or parameters can be sent to it. It must navigate autonomously.
Completely autonomous operation means pesky little problems like that one that dogged Scarlet initially can’t be fixed after the
fact, making the enterprise that much more difficult. The Scout team, too, realized their boat had a problem soon after it set
off - a software glitch caused it to ignore many of the offshore waypoints that had been programmed in (the bug was in code intended to prevent
the boat from backtracking should currents push it east of a given waypoint). But Scout got off okay and is still cruising toward
Spain. The team is pretty sure that it is headed for a waypoint that lies about 150 miles west of its final destination, Sanlúcar de
Barrameda.
Although the construction of Scout’s hull is somewhat high-tech carbon fiber sandwiching Divinycell
foam, the rest of the boat is comparatively simple. Solar panels mounted on the top of the hull
charge a lithium-iron-phosphate battery, which in turn powers an ordinary trolling motor attached to the bottom of the hull. (In good
DIY style, the motor was purchased at Dick’s Sporting Goods.) Under ideal conditions, the battery will gain sufficient charge during the
day to power the boat’s motor throughout the following night. Under less than ideal conditions, the motor shuts down when battery
voltage gets too low, and the boat just drifts until it can get charged up again.
Scout is plenty seaworthy even when it’s not under power, and there’s nobody to feed or entertain, so
drifting with the waves for a few days is no big deal. Even raging storms shouldn’t be a
problem: An angled upper deck and a hefty amount of lead on the bottom of the keel ensure that the boat will quickly right itself if
it gets flipped over.
Scout’s builders also included a couple of simple fail-safe features. One is that the onboard computer (an Arduino, of course!)
gets automatically reset every few hours. This should protect it from freezing up should there be a memory leak or other subtle
problem with its code.
The other clever measure they took was to program the boat to stop and back up a little ways every five hours. Their thinking was that
this maneuver could help to clear the keel and motor of any flotsam it might have picked up. They say that they tested this technique
and that it works pretty well.
I hope so. In my estimation, Scout’s greatest challenge will come from encounters with marine garbage, in particular stray bits of
fishing line, which could easily foul the prop. Sargassum, a common floating seaweed, could also cause trouble.
That Scout has made it more that a quarter of the way across is encouraging, though. As a great admirer of ambitious DIY endeavors,
I will continue to monitor its progress across the increasingly rough North Atlantic over the next few months and cheer the little
boat onward through wind and waves from the comfort of my warm and dry office.
Article by David Schneider
(Spectrum IEEE)
Scout
Video
LINKS
http://spectrum.ieee.org/automaton/robotics/diy/robotic-boat-hits-1000-mile-makr-in-transatlantic-crossing
http://www.oldsaltblog.com/2013/09/scout-transatlantic-autonomous-robotic-boat-battling-atlantic-ocean/
https://twitter.com/ScoutTRANSAT
https://www.facebook.com/ScoutTransatlantic
http://www.wpri.com/on-air/green-team/ri-students-design-solar-powered-boat
http://www.solarracing.org/2013/06/10/autonomous-solar-powered-boat-to-cross-the-atlantic/
http://letsmakerobots.com/node/38270
http://www.kickstarter.com/projects/601285608/scout-the-autonomous-transatlantic-boat
http://www.kickstarter.com/help/school#defining_your_project
http://www.kickstarter.com/start?ref=footer
http://www.gotransat.com/
http://www.gotransat.com/tracking/
http://makezine.com/magazine/transatlantic-drone-takes-to-the-sea/
http://www.behance.net/gallery/SCOUT-Transatlantic/10153015
www.marinetraffic.com
- busy shipping lanes
UK Winds , Sailflow
Winds , Met
Office Rain & Wind
World
Sea
conditions, Temperatures
& Sunshine
windfinder.com
or magicseaweed.com
for expected wave heights
http://www.python.org/
Scout
on Facebook
http://www.yellowbrick-tracking.com/
http://fishpi.org/wiki/index.php?title=The_Proof-Of-Concept_Vehicle
http://fishpi.org/wiki/index.php?title=The_Prototype
http://fishpi.org/wiki/index.php?title=Hull_Design
http://www.raspberrypi.org/
http://international.findmespot.com/
http://www.amsat.org/
Robotic-boat-hits-1000-mile-makr-in-transatlantic-crossing
Blackcurrant
1 | Blackcurrant
2 | Catamaran
Hull Design
Drag
| SWASH |
SWATH
| Trimaran
|