
French
Navy has plans to fit the vessel with a towed array sonar and small
submarine drones by 2011. The goal of this type of unmanned surface
vehicle is to conduct minehunting operations over large stretches of the
sea, both in the littorals and offshore, without endangering the lives
of human crewmen, according to defense-aerospace website. The French
Navy and DGA will carry out the sea trials in 2011 and 2012 off the
western tip of Brittany.
SLAMF
- FUTURE MINE COUNTERMEASURES PROGRAM
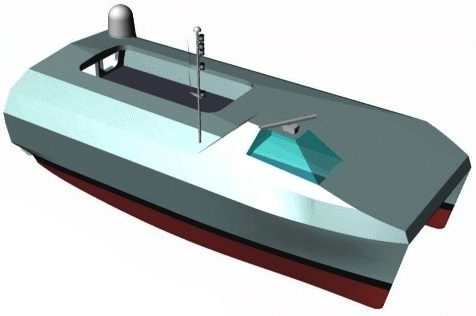
The Espadon (French Swordfish) Project is composed of an optionally-manned surface vessel named Sterenn Du (Black Star) and accompanying autonomous underwater vehicles (AUV). Espadon is a demonstration program contracted for France's DGA (Directorate of armament) by DCNS, Thales, and ECA in 2009. The 25 ton, 17 meter catamaran hulled ship was constructed by Breton Pech'Alu International under contract from DCNS and is designed to perform autonomous mine-hunting missions. The mother ship was launched in 2010 and carries a towed sonar and autonomous underwater vehicles designed to detect and neutralize mines. Sterenn Du is capable of retrieving AUVs (including the Alister) via an unique towed capture device for recharging and data upload.
Espadon is a component of the over-arching Système de Lutte Anti-Mines Futur (SLAMF, future mine countermeasures program).
EURONAVAL
OCTOBER 2012
Unmanned systems at sea offer advantages and face challenges that are often different from those associated with airborne and ground-based systems. For example, in a patrol mission that calls for long endurance at low speed, the size of a manned ship is largely driven by the need to provide tolerable accommodation and stability for the crew—a limit that does not apply to an unmanned surface vessel (USV).
On the other hand, manned craft have long range and payload because of their size, and nobody is interested in a USV weighing several hundred tons. That means that USVs either need a mothership (launch and recovery techniques are still in the works) or may be confined to coastal roles. Also, sensor and communications line-of-sight distances are subject to the unbreakable laws of mast height and horizon distances.
Consequently, fielding USVs and autonomous underwater vehicles (AUVs) may be more a question of matching basic technology to the concept of operations (conops), while applying new technology selectively.
A major French effort, to be unveiled at the Euronaval show in Paris later this month, pulls together USV and AUV technology to create a unique minehunting system including three world-first technologies. The Espadon (Swordfish) project, launched by the DGA French procurement agency in July 2009, is being run by a team comprising naval systems group DCNS, robotics company ECA and Thales.
The centerpiece of Espadon is a 17-meter (58-ft.)-long, 25-ton, boxy-looking catamaran USV named Sterenn Du (“black star” in Breton). Because current French legislation forbids surface vessels from navigating without human beings aboard, Sterenn Du has a small pilot's cabin, set to one side much like an aircraft carrier's island. But the Sterenn Du can also be teleoperated or be completely autonomous.
Sterenn Du's role is to deploy AUVs. It would be brought close to the mission zone by a dedicated mothership of 2,500—3,000 tons, which would remain a safe distance from the minefield. Aboard the Sterenn Du are three AUVs developed by ECA, which constitute its actual mine-hunting and destroying tools.

The
Dragonfly mine hunter, which is based on a Bluefish-SNAV platform achieves much the same as the Sterenn
du,
including autonomous launch and retrieval of AUVs, ROVs, etc. The one
big difference is that the Dragonfly carries out mine countermeasure
duties using only energy harvested from nature.
The biggest technological difficulty was the design of the launch and recovery system, Stephane Meltzheim, head of the Espadon project at ECA, told Aviation Week. It is harder to get two autonomous machines to connect in high seas than in outer space. There are currents, winds and waves to contend with and the DGA specified that the vessels must be operational in Sea State 5. A traditional
minehunter cannot operate beyond Sea State 3.
The solution resembles the drogue and hose used in inflight refueling: using one of its world-first features, the Sterenn Du unwinds a cable that the AUV clamps onto and the cable then draws the AUV inside a cage between the two hulls of the catamaran, another first. Meltzheim adds with some pride that there has been close to a 100% success rate in tests with the system, which ECA has patented.
The third innovation is active and passive shock-absorbing systems in the cage, which means the AUV stays as stable as possible despite any movements of the ship. Once the AUV is in its cage, it is brought up inside the Sterenn Du.
Each of the three AUVs has a specific role. The first to be launched would be the DCL (detection, classification and localization) AUV. It is 5 meters long, weighs between 800-1,000 kg (1,764-2,200 lb.), has a range of 40 km (25 mi.) and an endurance of between 10 to 20 hr., depending on the type of battery installed. The DCL vehicle carries a sonar to detect and classify underwater objects. “This vessel has the intelligence to work by itself and overcome any unexpected problems it may come across,” says Meltzheim. The vessel was developed in 2006-09 but the automatic recovery system was added for the Espadon program.
Data collected by the DCL AUV is transmitted back to the mothership, where operators decide what objects need to be observed more closely, then program the second AUV and send it out. “This catamaran AUV, specifically developed for this project, is extremely maneuverable, with two propellers at the front and two at the rear, four cameras, lighting and a small sonar,” Meltzheim explains. “It is programmed with all the [mine-like contacts], which were identified by the DCL, and it observes them one by one,” acquiring still and moving imagery. It goes over each contact at least once and when it has completed its mission, it returns to the Sterenn Du.
At this point, the third AUV comes into play. Until now, the project has used a reusable vehicle which is wire-guided to the mine, drops an explosive charge next to it and retreats before detonating the charge to destroy the mine. “However, the tendency today is toward using expendable and much cheaper kamikaze-style robots, guided to the mine by an operator,” says Meltzheim.

Espadon aims to evaluate a system capable of processing vast maritime and coastal areas, in a discreet way and without exposing personnel to the danger. The system is composed of an unmanned surface vehicle
(USV), the “Sterenn Du” (“Black Star” in Breton), equipped with launch and recovery systems, and of two types of autonomous underwater vehicles
(AUV) aboard Sterenn Du, for the detection and identification of the mines.
Once sea trials are completed in the next few months, the next step will be to launch a second prototype, which will be co-financed by
France and the
U.K. in the framework of the November 2010 Lancaster House treaties.
Another major USV development appearing at Euronaval also reflects the use of new and mature technology to match a developing conops: a new and larger version of the Protector USV from Israel's Rafael. Work on the 11- meter craft started about three years ago. After evaluating smaller craft, the developers saw a need for a vessel that could operate in higher sea states, as well as provide better speed and endurance—up to 48 hr. in some conditions—and a bigger payload.
With a larger and more costly USV performing longer and more distant missions, a dual, fully redundant diesel-and-waterjet drive system became a priority to ensure that no single failure would prevent the operator from returning the vessel to base. Redundancy extends to the electrical and control systems, and new features have been added to enhance damage control capabilities and system health monitoring.
The new boat is based on a patented design, optimized for unmanned operation with increased buoyancy and survivability. The
aluminum hull is a heavy-duty, rigid, deep-V planning design with sealed bulkheads and a foamed D-collar, designed for performance and high survivability in high seas. The Protector has a crew of two to manage sensors and control the boat, and carries radar and electro-optical sensors and a communications/data link suite that can interface with wide-area systems like those used for maritime surveillance and border patrol.
With its immediate range of vision limited by mast height, the Protector is an interceptor. Once a potential threat is detected, the Protector is sent to intercept the target and identify it using the Toplite stabilized electro-optical turret. The onboard loudhailer system is used to approach the target and determine its intentions. A water cannon can be used for non-lethal engagement, but the Protector also carries the Mini-Typhoon stabilized gun system, and can be fitted with a strike module that includes Spike missiles for long-range precision engagement. The Protector can also be used as an electronic warfare platform to a degree.
The U.S. Navy is looking for a USV in the same size class as the new Protector, as a way of bolstering its mine warfare capability. The service has been criticized for downplaying the importance of mine warfare and is now playing catch-up. But the Navy wants a vessel that can quickly survey a large area to hunt and counter mines at all times, notes Stanley DeGues, senior business development director for Textron subsidiary AAI Advanced Systems, which is developing a common, unmanned surface vessel (Cus-V).
“Only mine ships can do it at night,” DeGues says. “Helicopters can't do that.”
AAI is offering the Cus-V for the Navy's proposed unmanned influence sweep system (UISS), meant to provide Littoral Combat Ships (LCS) with a stand-off, long-endurance, semi-autonomous minesweeping capability to counter acoustic or magnetic influence mine threats in the littorals. The Navy plans to test UISS platforms starting in fiscal 2014 and hopes to have them ready for initial operational capability in fiscal 2016.
For the cost of a single mine-hunting helicopter, DeGues says, the Navy could buy 8-12 Cus-Vs. A Cus-V is 39 ft. long, has a draft of slightly more than 2 ft. and reaches a top speed of 28 kt. It has a cruising range of about 1,200 nm, can tow up to 5,000 lb. while traveling at about 10 kt., and features a 14-ft. payload bay, as well as an autonomous launch, tow and recovery system to deploy a sweeper.
While being developed with the LCS fleet in mind, the Cus-V is land-transportable, air-transportable in a C-17 and C-5, and can be ferried by ship—even commercial vessels, DeGues says. The Cus-V also could be launched out of the well decks of large-deck Navy amphibian assault ships, he notes. There also are some global queries about the ship, too, for missions like harbor security, he adds. “Internationally, folks are very interested.”
In the AUV world, the Office of Naval Research (ONR) is pressing forward with work on the Large Displacement Unmanned Undersea Vehicle (LDUUV).
A variety of AUVs of various shapes and sizes are in service and in development around the Navy, ranging from the Naval Oceanographic Office's Littoral Battlespace Sensing gliders to the Knifefish mine countermeasures AUV planned for use on the LCS, but these are basically single-mission vehicles. LDUUV is planned to have long endurance and operationally useful speed, autonomy and payload capacity, enabling independent, clandestine operations in forward areas.

The DGA awarded Espadon in July 2009 to DCNS, Thales Underwater Systems and
ECA. The Sterenn Du was launched in December 2010. The ability to launch and recover AUVs was tested in 2011. Full automation and remote control from the shore were also demonstrated. In the second half of 2012, the first type of
AUV, dedicated to the identification of the threats, is being tested. Eventually, in 2013-2014, the second type of
AUV, dedicated to the autonomous detection and classification of mines, will be tested off the coast of Brittany.
Though the Navy has not yet specified which missions the vehicle will perform—an analysis of alternatives (AoA) now being conducted by Naval Sea Systems Command is slated for completion next March—a few possibilities present themselves. The stealth and persistence of a long-endurance AUV will be especially useful for intelligence, surveillance and reconnaissance (ISR) or preparation of operational environment (IPOE) missions, such as bottom mapping. But it is not hard to envision the LDUUV carrying mines, bomblets or miniature torpedoes, and performing missions previously in the domain of manned submarines like the tracking of enemy
submarines.
LDUUV could also be uniquely suited to address emerging missions like defense of the pipelines and telecommunications cables that are increasingly vital to the global economy, or attack on an adversary's undersea sensor networks. Simply put, LDUUV will fulfill a persistent ISR and battlespace preparation role, but will also expand the reach of the U.S. submarine force and perform missions that are impossible for anything in the current arsenal. Moreover, it will enter just in time to mitigate the slump in force structure that will hit in the 2020s, as the large Cold War fleet of Los Angeles- class subs retires.
The new craft is different in important ways from failed predecessors like the Mission Reconfigurable UUV (MR-UUV). Released from “the tyranny of the 21-inch tube,” it has more room for energy storage and payloads. It is designed for launch and recovery from a variety of platforms: SSGNs and Virginias via their large-diameter tubes, the Littoral Combat Ship, piers, or contracted merchant ships. Energy technology has advanced since the MR-UUV as well, allowing for greater energy density and longer endurance—though much work remains to be done in this area to produce an operationally useful vehicle. And perhaps most importantly, it has support at the highest levels of the Navy. In February, the chief of naval operations, Adm. Jonathan Greenert, told reporters “I'm very much desirous of that end-state, cross-ocean, as feasible . . . 30-day, 45-day.”

Advanced
as Actuv and LDUUV may be in concept, they are years away from hitting
the water, let alone becoming operational. For the time being, Europe
and Israel
appear to be well ahead in terms of making autonomous sea systems a
reality.DCNS Thales - UAV demonstrator surface Sterenn Du.
After the LDUUV AoA is completed in 2013, the Navy is likely to issue a formal request for proposals in fiscal 2014, according to a February statement from the LCS program office, its sponsor. In the meantime, ONR plans to produce 10 Innovative Naval Prototype (INP) vehicles, focusing on technologies that will improve energy density, autonomy and reliability. These prototypes will be transitioned from ONR to the fleet after completion of the INP program, and the Navy intends to have a squadron of 10 operational LDUUVs by 2020.
Even more ambitious than LDUUV is a Defense Advanced Research Projects Agency (Darpa) project for an unmanned vessel that can shadow a manned sub throughout its patrol. Darpa recently chose Science Applications International Corp. to lead the design and construction of an operational prototype Anti-Submarine Warfare Continuous Trail Unmanned Vessel (Actuv). The aim is to demonstrate a non-stealthy autonomous vessel that can track a quiet diesel-electric submarine overtly for months, over thousands of kilometers, with minimal human input. At-sea testing is planned for mid-2015.
Actuv has a clean-sheet design, to take advantage of its crewless concept by relaxing normal warship requirements such as buoyancy reserve, dynamic stability and platform orientation. In addition to autonomy and reliability, a key goal of the program is to achieve “propulsive overmatch” and demonstrate “disproportionate” speed, endurance, maneuverability and sea-keeping to enable unconventional tactics in response to target behavior.
Actuv would not detect the submarine, but would relieve ASW forces of the task of keeping tabs on the boat once it has been picked up. It is intended to use acoustic, electro-optical,
radar and lidar sensors to acquire and follow its sub targets through high seas and periods of lost communications, while navigating in compliance with international maritime regulations, autonomously avoiding other surface craft. With an unrefueled range of 6,200 km and an endurance of 80 days, the vessel will be under “sparse remote supervisory control” from the shore via beyond-line-of-sight data link.

MINE
WARFARE - FRANCE MAKES CARRIER DRONE FOR DRONES SEPTEMBER 2010 (translated
from French)
The first French drone carrier, or mothership, was launched in Hennebont,
Morbihan. It was a great opportunity to see this amazing device that could revolutionize mine warfare. Called Sterenn Du (black star in Breton), the drone surface type USV (Unmanned Surface Vehicle) was
produced as part of an upstream program (EAP) for which the Directorate General of Armaments
(DGA) awarded a contract in July 2009 to DCNS, Thales and ECA.
The three manufacturers,
who specialize in naval systems, electronics, sonar and drones, have joined forces to develop a prototype that will be used for studies to determine the future SLMAF program (System control future anti-mine)
which succeeds the current tripartite mine hunters (CMT) of the Navy.
The
idea is to use SLAMF to replace "small" minesweepers with a large platform implementing
many drones, each one capable of deploying other drones or sonar systems
- like a swarm of insects. The mother ship could be a catamaran of a few hundred meters
from 2000 to 3000 tons (compared to 51 meters and 600 tons of current
CMT).
This broad platform with
or without a crew, would have on the system back into the water for two large unmanned surface. These UPS are designed to operate remotely
from the mother ship, embark on them unmanned underwater vehicles or detection systems in place to identify and neutralize mines.
In addition to these UAVs, the mother ship would also have a platform for a helicopter or unmanned aerial vehicles, UAVs (Unmanned Aerial Vehicle) may in particular serve as relay communication between
HQ and surface vehicles.
THE
PRINCIPLE OF SLAMF (DCNS)
A long drone drone carrier 17 meters From the Sterenn is precisely the demonstration of one of the two UPS that would be implemented by the mother ship. Built by Breton society Pech'Alu International, it is a catamaran of 17 meters long, 7.5 meters wide and 25 tons displacement. The unmanned craft will be able to deploy, that is to say, into the water and automatically recover two types of materials: A towed sonar designed for the detection and classification of mines, as DUBM-44 Thales (currently implemented on the BRS Antares kind) as well as unmanned underwater vehicles. These can be either AUV (Autonomous Underwater Vehicle), able to classify and identify mines or ROV (Remote Operated Vehicle) dedicated to the destruction of mines (also known as "killers mine"). 's sonar Synthetic Aperture DUMB-44.
Note that the
Sterenn Du demonstrator is considerably larger than the UPS appeared in recent years. Thus, the Inspector, developed by ACE and also designed for the deployment of small drones (as minekiller Kster) and sonar, measuring only 9.2 meters. From Sterenn with the significant increase in size will not only better stability, but also have increased capacity, allowing the carriage of AUV vehicles whose size and mass are quite large. Thus, Alister ECA measure 4.4 meters and weighs more than 800 pounds.
To minimize human intervention Drone drone carrier, the UPS developed in the project swordfish must be able to carry out all aspects of mine warfare without the need for direct human intervention. This concept is the basis for future SLAMF program is, in fact, conducting demining operations over vast maritime and coastal areas without exposing the lives of operators.

It is, in particular, to save maximum employment clearance divers and thus limit the risks taken by men. The system, if it is developed, would also important capability and financial gains. Replacing all or part of the work done today by men, machines do not actually know the constraints of personnel, such as recovery time and rest between dives. Gains could therefore be significant in terms of human resources perspective that is not displeasing to the Department of Defense in an increasingly constrained fiscal environment.
Obviously, you can always ask if the machines manage to be sufficiently effective to replace the clearance divers, who are now employed in addition to sonar and ROV means (such as PAP 104) made ??from CMT (ie ie relatively short distances). Always at the heart of the French, divers rely on a remarkable expertise internationally recognized. Their replacement by drones leaves some skeptical observers. However, recent history in a number of areas such as offshore, demonstrated against the initial fears that the machines could advantageously replace men. So why not in mine warfare? Divers-miners
experiments at sea in 2011 and 2012 Clearly, the DGA and the Navy believe enough in technological advances in unmanned devices to launch a PEA and achieve a demonstrator.
If the technology does not prove sufficiently mature, it will be possible to go through transitional stages, for example by transforming the vehicle driven by UPS. Sterenn From will, in fact, intended to validate the concept of employment imagined under SLAMF. The experiments will, in particular, to test the interfaces and management of the implementation of two floors of drones, which implies a rather complex system. It must indeed manage the deployment of various drones and sonar in an integrated system, establish a schedule of each drone with adequate reactions in different situations (which requires the development of smart mission), while incorporating issues autonomy, or communications and transmission of information. For this Sterenn Du, with different equipment, will lead many companions at sea off Brest in 2011 and 2012.
The UPS will be deployed from a boat mother
a half-dozen systems and European cooperation It is during the next military planning law (2015-2020)
that the SLAMF program must be started.
Exact specifications depend on experiments conducted through EAP Swordfish and technological advances, and possibly the evolution of the need expressed by the Navy. The latter is, for the moment, half a dozen systems to replace 11 minesweepers tripartite (CMAT) still in service. Note that France is also seeking to develop European cooperation around SLAMF program.
Belgium and the Netherlands, historical partners with whom CMT were developed in the 80s, might be interested, as well as other countries such as Britain and Germany, which also have to renew their means in mine warfare.
Ideally, a mother ship of this kind could also be equipped with other types of unmanned devices, such as small USV equivalent to Inspector ACE or large semi-submersible drones SeaKeeper the type developed by
DCNS.
LINKS
http://www.meretmarine.com/fr/content/guerre-des-mines-la-france-met-leau-un-drone-porte-drones
Sterenn
du autonomous mothership
http://www.navyrecognition.com/index.php?option=com_content&task=view&id=731 http://www.brahmand.com/news/France-launches-naval-drone-demonstrator-Espadon/5769/1/13.html http://www.navaldrones.com/Espadon.html
http://www.aviationweek.com/Article.aspx?id=/article-xml/AW_10_15_2012_p04-500687.xml
http://www.fbo.gov/index?s=opportunity&mode=form&tab=core&id=f99b89f85139680dc1cdb0c49a22dde9&_cview=1 http://www.militaryaerospace.com/articles/2013/07/darpa-uuv-mothership.html
http://nosint.blogspot.co.uk/2013/07/darpa-considers-unmanned-submersible.html
http://airsoc.com/articles/view/id/51f6a7809aad9d6f20000002/darpa-hydra-unmanned-submarine-to-deploy-drones#.Uhfr1NKsg6Y
http://en.wikipedia.org/wiki/DARPA
http://www.darpa.mil/
https://www.dstl.gov.uk/centrefordefenceenterprise https://www.dstl.gov.uk
http://www.maritimejournal.com/news101/industry-news/ukho-appoints-new-national-hydrographer http://www.thefutureofnavigation.com/ten_steps.aspx
https://www.dstl.gov.uk/insight
US
Department of Navy Research, development & Acquisition - http://acquisition.navy.mil/ US
Fleet Forces Command - http://www.cffc.navy.mil/
US
http://www.msc.navy.mil/
The
key to providing safe passage for merchant ships is persistent monitoring,
for which the Bluefish SNAV
platform is a robotic ocean workhorse. Based on a stable
SWASH
hull this design is under development by British engineers, who are looking for international
agents and partners. The robot
ship uses no diesel fuel to monitor the oceans autonomously (COLREGS
compliant) at relatively high
speed 24/7 and 365 days a year - only possible with the revolutionary (patent) energy harvesting system. The
hullform is ideal for automatic release and recovery of ROVs
or towed arrays, alternating between drone and fully autonomous modes.
This vessel
pays for itself in fuel saved every ten years.
|