|
|
BLUEFISH - ENERGY HARVESTING DEVELOPMENT PROGRAMME
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
ZERO CARBON - A prototype 50 meter container ship with 6 TEU standard containers shown in red rust inhibitor paint. They can be loaded from the rear if overhead loading is not available. An enhanced solar and wind turbine rig like this could generate 108kW (145hp) of energy peak. The average energy available 24/7 is likely to be around 62.4kW (83.6hp) and 70.7kW (94.8hp) or more in the trades. Rigged for passenger transport a vessel like this might weigh in @ 90 tonnes. An increase in solar panel area and bigger wind turbines will improve performance more, but development will be longer and more costly. If this vessel performs as expected, the age of zero carbon shipping is getting closer.
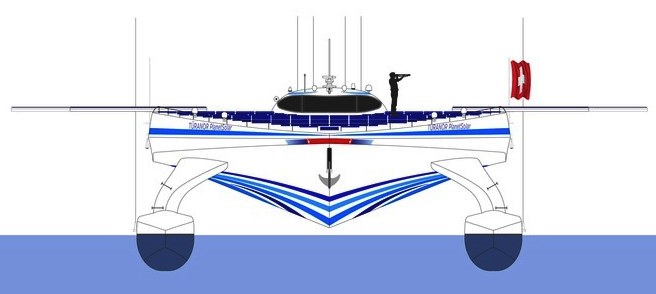
The turbines can be raised and lowered to cope with different running conditions as seen on the end view left. The main hull is cylindrical for minimum wetted area, while the outriggers provide stability, with a small wetted area for a low drag hull. The superstructure is low to reduce frontal area and air drag. Another important feature is that the turbines may be furled for parking in ports or during storm conditions. Please note that these drawings are Design Copyright © October 17&19 2019, Bluebird Marine Systems Ltd and Cleaner Ocean Foundation Ltd.
SCALE SOLAR COLLECTORS
The first requirement for any autonomous vessel is a reliable source of energy. Solar energy for boats is nothing new, but combining that with an effective wind energy harvesting system is something else. The Bluefish design uses sun trackers to maximize the harvesting of solar energy from a given wing size. A similar sensor based control system is used to harvest wind energy effectively. The automatic controls, hard and software (or robotics) for this function are available commercially. But, this is a new application and experimental - because nobody yet knows just how well it might perform. As far as we know, nobody has tried to combine such functions on an ocean going vessel as @ March 2015. Our feasibility model is just that: a model. But that makes no difference, provided that we adjust any data we obtain to take account of scale effect. The exception to this rule is wind turbine testing.
PHOTOVOLTAIC PANELS
For the Bluefish development models we will use triple layer, laminated, amorphous cells in combination with polycrystaline (16.5 - 17%) cells to provide 100+ watts of energy for hull speed tests. We can achieve more than this in wattage if we were to fully load the wings with monocrystaline cells, but being practical, we don't need more power for our tests. We are not going for any records here, and bear in mind that this is peak power - and we are concerned with averages using a battery store on the full size vessel. The models need not have a battery store and will be ballasted with lead weights for simulation and active hull purposes.
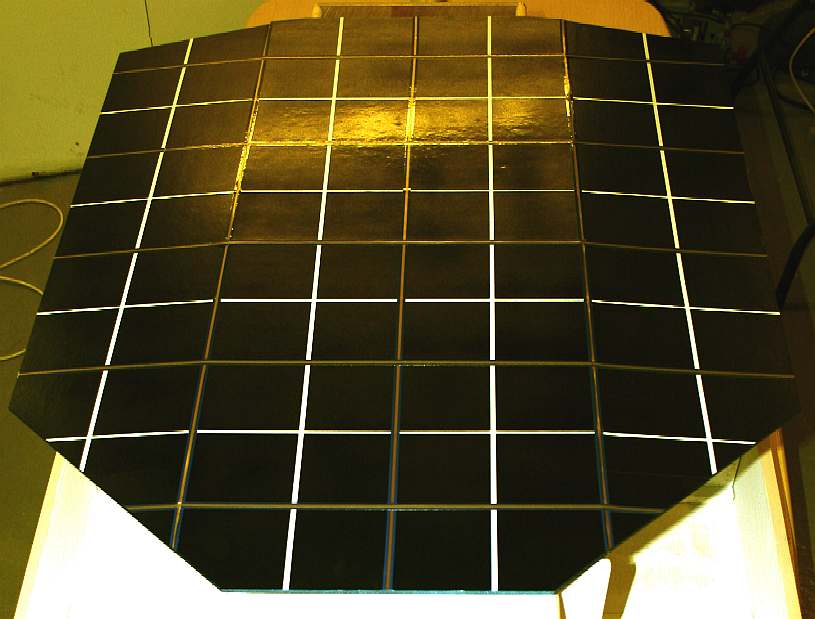
MODEL - Solar cells arrangement: 26 x 6"x6" (150x150mm) cells @ 4w/cell = 104w. Mass of the bare cells is around .338kg (.745lbs)
The full size vessel could achieve far more energy than this in terms of kilowatts per ton, but is being limited to 67kW (55kW + 12kW) on economic grounds, so around 2.8kW/ton at present displacement estimates for the smaller turbines setup, and 90kW (60kW + 30kW) for the larger turbine installation, to give 3.4kW/ton. 100w on this model is the equivalent of between 3.73kW/ton (5hp) - 5.89 kW/ton (7.9hp), depending on the weight of the final model. The model is therefore more powerful than the full size ship pro-rata, when it should perhaps be the other way around - and of course it is, because the model should have a considerable battery mass and it has none. Ballasted (lead weights) the power to weight ratio is roughly 5.27kW/ton (7.07hp) in the upper range. Or, looking at it another way, the full size ship may prove to be faster than we are working towards giving us a respectable safety margin.
The world record at the moment is held by Planetsolar, a ship that weighs 95 tons and generates 93.5kW from 825 solar panels. That works out to .984kW per ton. For this reason the Bluefish platform promises to advance the state of the art significantly in theory. That coupled to the stable low drag hull, could yield sprint speeds in excess of 18 knots with suitable motors, and that is why this is an exciting time for us. When built the Bluefish hull will be the largest solar powered boat in the world at 43 meters (140ft). Planetsolar is 113 ft long and the current record holder.
Five horsepower in a conventional hull (sailing boat) weighing one ton will not get you much above 7 knots in ideal conditions. In a one ton (long) canoe shaped hull you might do rather better, but that kind of performance from conventional hulls cannot compare to our advanced SWASH hull-form - the ultimate wave piercing hull, simply because most of it is submerged all of the time. Submarines travel approximately 1/3rd faster submerged than they do surfaced, mainly because they escape wave drag completely - having then to contend only with form drag for water. We are not that fortunate, having foils piercing the surface, and of course our outriggers to contend with - and that is why they are active.
The speed a vessel might achieve from a given horsepower also depends on the efficiency of your conversion from energy harvested, to thrust at the propeller. Our model's propeller will be nowhere near the efficiency of the full size vessel and it's not worth spending time developing model propellers, so we must measure the efficiency of each propeller used, to know the deficiency in real terms when testing small scale (static [bollard] thrust tests). We must also consider wind drag in our calculations, something many amateur and professional boat designers tend to ignore. Reducing frontal area has been something of a hobby-horse for the designer from the word go, which is of course the best way to reduce wind drag.
The solar wing panels are to be custom built and matched. They cannot be proprietary solar panels, because they weigh far too much and that would need a stronger (heavier) supporting structure.
SHIP - The full size solar panel/wing arrangement is more densely packed
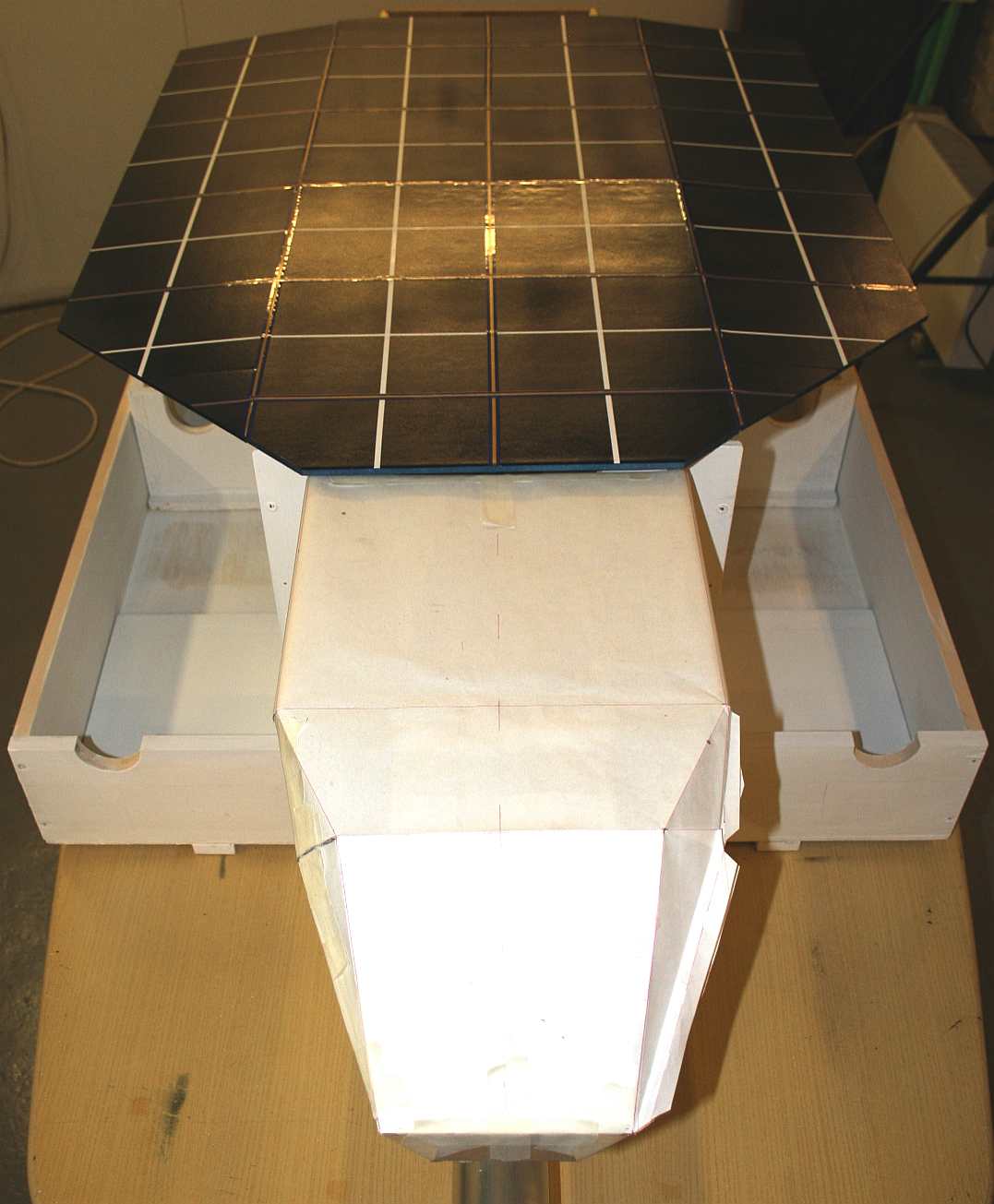
From drawing board to a 1/20th scale solar panel array with hinged side wings.
SOLAR TRACKING
A robotic microprocessor controlled tracking system is to be incorporated on the test models as a necessary improvement to solar powered ships, to increase energy collection from a given area - hence the overall performance of the vehicle averaged over a mission. This is not so important for the model speed tests, but we will get the mechanism working for data collection purposes.
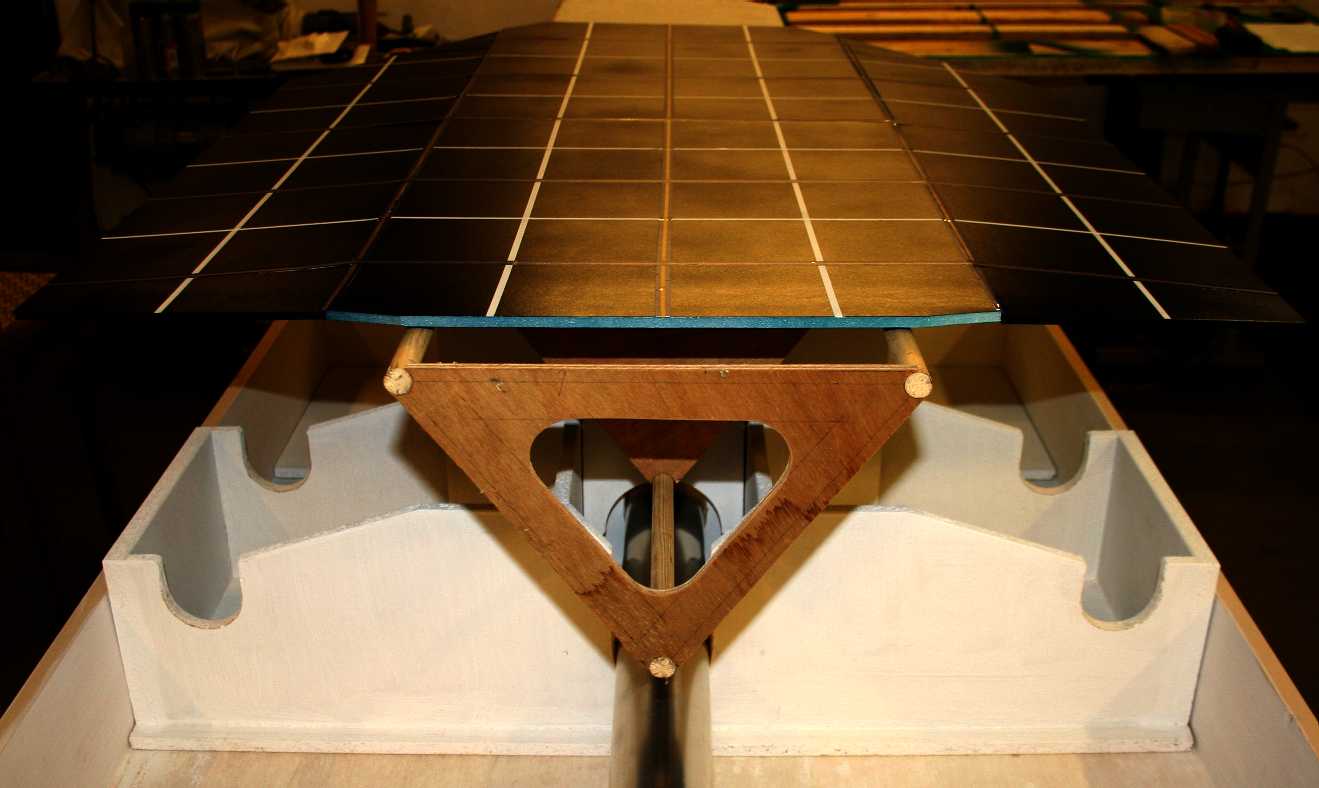
Put that into context with the forward helm position, looking from the bows to the stern. There are to be solar panels on the roof of the helm. It would be eco-engineering sacrilege not to use such a large flat area to capture energy from nature.
TRANSIT EXAMPLES - The above table illustrates one of the most likely ocean awareness expedition routes that could be undertaken by the Elizabeth Swan, showing the time elapsed in days for 7 knots average cruising speed, including times for 5 and 6 knot averages - allowing for 10% downtime and 36 days in ports. Hence, although the objective is to reduce the current solar circumnavigation record from 584 days, the event in not an outright non-stop yacht competition in the offshore racing sense. It remains to be seen how accurate such a prediction might be.
IMPROVING THE POWER TO WEIGHT RATIO
The mass of a vessel ultimately determines the resistance to movement through the water. For the purpose of discussion we are taking it that the ship the object of our focus, is as form-efficient (slippery) as is possible.
There are many ways to reduce weight. We can use exotic materials such as aramid and graphite fibers, or we can design an aluminium structure to use less material, for which a simple bridge across a river type structure is a good starting point when analyzing loads and sections. Ship design has changed little for centuries, simply because there has been no need to alter the basic concept of a log floating in the water with tapered ends.
Structurally, that is like comparing a worm with a flying insect, but there has been no reason to consider lighter, intricate structures, except perhaps in racing catamarans. Insects are very efficient lightweight structures. An ant may carry 200 times its own body mass, which is like a man picking up a Rolls Royce.
Many insects have mastered land, air and water travel by design; a minor miracle. Like an insect, we are looking for very lightweight wings to support our solar panels. It does not stop there with the wings; we must include the frame that supports the wings - and that frame must in turn attach to our submerged hull.
An animal that travels at speed in the water and also has wings to fly, is the amazing Flying Fish, which also happens to be blue in color. That is one reason we have chosen the flying-fish as the legend for these development hulls.
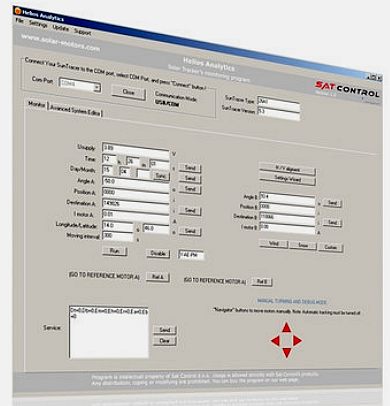
Light sensors on the left, combined with wind speed sensors on the right and a simple comparator circuit, gives us a means to head the solar array at 90 degrees to the sun. When wind speed gets up to a dangerous level, the wind speed sensor triggers wing-panel lock-down. Fortunately, that will not be too often. The Sat Control system comes with Windows based PC software to analyze the performance of your system.
Apart from the sensors, you also need a motor device to drive the arrays up or down to face the sun. The Sat Control system is very neat. We particularly liked the simple collar for making adjustments in set-up. Note the sturdy galvanized steel frames.
Here is a short ram. Stainless steel is used in the main. The spherical rods ends are of course a universal solution to changing alignment, as enjoyed in aviation, motor sport and just about every other engineering application one can imagine including RC models.
A land based installation from Sat Control, firmly affixed to mother earth with a hefty concrete base. That should keep her steady. This is a 2 axis or dual axis Solar Tracker with accuracy better than 0,5 deg and frame-structure for 15 pieces of solar panels dimensions 0,99 m x 1,95 m and weight of 30 kg max each. So together for 25 m2 solar panel surface. Suitable for PV panels, concentrators - CPV, heliostats. Usage at homes: on-grid at roof on houses, traffic signals, street light, cottages, small and large power-plants where solar panels are connected in serial and output is connected directly to inverter or an external charging device. Wind resistance is max. 144km/h, 10min average wind speed 72km/h. In a Year basis with 2 axis motor you can get 7% more income of energy compared to single axis motor.
ABOVE LEFT: The Bluebird™ yacht shown above has mid-range (partially) raised turbines in a high beam wind (they can go much higher), the vector causing roll to port, where the vessel is shown heading towards us. In addition, the solar arrays are tilted down on the starboard side and up on the port side, which causes additional air drag, hence heeling to port. The autonomous trimming system compensates for this running condition using the active outriggers, by raising the starboard outrigger out of the sea and lowering the port into the sea. The main hull of the vessel then remains vertical and the yacht can continue to harvest more energy from nature than it might had the outriggers not been moveable and designed to compensate in this manner.
ABOVE RIGHT: A similar situation applies in this depiction, except that the wind is faster, as in a storm and coming from the port side, causing roll to starboard. With the wind speed much higher, the turbine boom needed to be lowered to reduce roll, while the port outrigger has been raised out of the sea, to effect vertical running. By this means the ship can trim itself to harvest as much energy from the wind as it is safe to do, while still maintaining comfortable conditions for a crew - or if unmanned, simply to maintain a higher average mission speed. The design of this vessel is © August 2014 and the technology is patent applied for.
EXISTING COMMERCIAL TRACKERS
Sat Control is one of the leading manufacturer of active solar tracking systems in the world. Our customers include utilities, corporations, small businesses and homeowners. Sun Tracer™ are manufactured in the EU. We ship Sat Control Solar Trackers worldwide and work through a network of Strategic Partners, Distributors and Dealers.
SAT CONTROL CONTACTS
And in this picture we are looking from the stern to the bows. Note the angle cut adjustments to the main sliding jig carriage. This is to make it easier to install and work on the active outrigger legs. These legs will be microprocessor controlled for the least possible drag commensurate with stable passage. The active outrigger hulls will be fitted in this jig section.
BLUEFISH DEVELOPMENT PROJECT INDEX A-Z
EXTERNAL LINKS
http://www.solar-motors.com/ http://www-robotics.jpl.nasa.gov/publications/Yoshiaki_Kuwata/Kuwata11IROS_final_v3.pdf http://www.cyberiad.net/leo.htm
Solar House, BN27 1RF, United Kingdom + 44 (0) 1323 831727 +44 (0) 7842 607865
COMPARISON - The array for the Enterprise 1 is equivalent to 220 meters of panels. We will still have two wings to track the sun, but as you can see from the diagram above, they are smaller than the original Bluefish ZCC setup seen above. Two-hundred and twenty meters of panels is likely to yield 42kW of energy in bright sunshine. If, as we think it is possible that our turbines can generate 20kW peak, then the total harvested electrical energy is around 60kW in ideal conditions. Averaged, that is reduced to under 30kW, some of which will be used to drive the vessel and operate the robotic machinery and computers, and the remainder to process plastic waste. The power to weight and power to drag ratios are therefore well below that of the Bluefish ZCC concept, but then this is not a performance machine, rather an ocean workhorse.
INTERESTING EARLY DEVELOPMENT TEST MODELS - LINKS
Blackcurrant 1 | Blackcurrant 2 | Catamaran Hull Design Drag | SWASH | SWATH | Trimaran
The models seen on these pages are being constructed under license for testing of the robotic, solar and wind energy harvesting systems, - using radio control initially, switching to computer micro-controller for fully autonomous robotic control.
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
This page is Copyright © 2015 Bluebird Marine Systems Ltd. The names Bluebird™, Bluefish™, SeaNet™, SeaVax™ and the blue bird & fish in flight logos are trademarks. All other trademarks are hereby acknowledged.
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||