|
SEAVAX™ - AUTONOMOUS SOLAR POWER
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
SEAVOLUTION - The key to economic plastic recovery from the vast oceans is solar power; harvesting free energy from nature - in our case also including wind power - to boost energy levels. Full size, this autonomous vessel could filter up to 150 tons of plastic from polluted seawater before it has to offload - without using a drop of diesel. There is a market for recycled plastic. According to the latest report from the University of California) there is between 4 and 12 million tons in our oceans. That's a phenomenal untapped resource that is growing every year. The Enterprise 1 is shown here without its moveable wings, just the deck and arm panels.
SOLAR WINGS - Need to be designed so that they have sufficient angular movement to be able to take advantage of the ability to track the sun. The diagram above gives an example of a wing with 231 degrees of rotation. This is more than is needed for an effective sun tracking system, the objective being to be able to fold the wings flat over a central deck in storm conditions. One hundred degrees of movement would be more than enough if this was not a dynamic situation.
OCEAN ENTERPRISE 28 MARCH 2015 - FEASIBILITY STUDY
The Ocean Enterprise MK1, is a 1:20 scale model of a proposed autonomous, solar powered (small) ship that is designed to vacuum up plastic from the sea. The main ingredient here is the solar power, without which we do not have an autonomous vessel. Fortunately, we've inherited a lot of practical data on solar radiation (incoming solar radiation = insolation). British Petroleum (BP) were very helpful in providing insolation figures, which were then tested at various locations. The industry is very much more advanced since the early study below, and indeed, the Swiss solar powered vessel, PlanetSolar, proved the theory developed for a British attempt on a sun powered circumnavigation from 1995. PlanetSolar succeeded on the 4th of May 2012.
DATA COLLECTION - The most important part of a solar powered ship is the energy harvesting apparatus. In our case this is a mixture of solar arrays and wind turbine generators. Wind energy is of course, a conversion of solar energy from heating the earth's surface, so creating convection currents. We know from other studies that it is an advantage to have panels that track the sun. Our problem though is trying to keep costs down and still have enough energy onboard to spare to filter the plastic waste from seawater. For this reason we need to either prove or disprove the theory that tells us that tracking the sun will significantly improve energy collection. The above diagram was compiled in measuring the output of a solar panel at different angles not far from the equator, with thanks to Captain Malcolm Burwood. Both the sun and earth are globes orbiting in space. Essentially, we are interested in the angle of radiation from one globe to the other - in quantifiable terms.
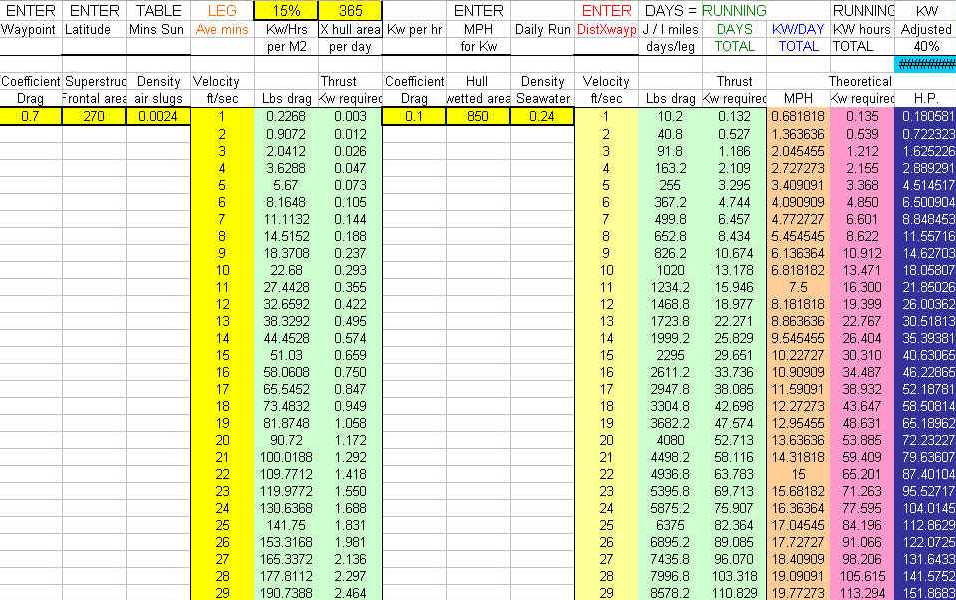
EXCEL SPREADSHEET - Using the information that we have gathered as to solar panel efficiency and geographical insolation, we input those figures into a standard Microsoft Excel spreadsheet with appropriate formulas for hull drag, etc, and this gave us a good idea of what a properly designed solar powered ship might achieve in terms of operational velocity during long endurance missions. What is missing from the example shown above is input from wind energy. This program was supplied by the original conceptual design engineer from a project in 2001.
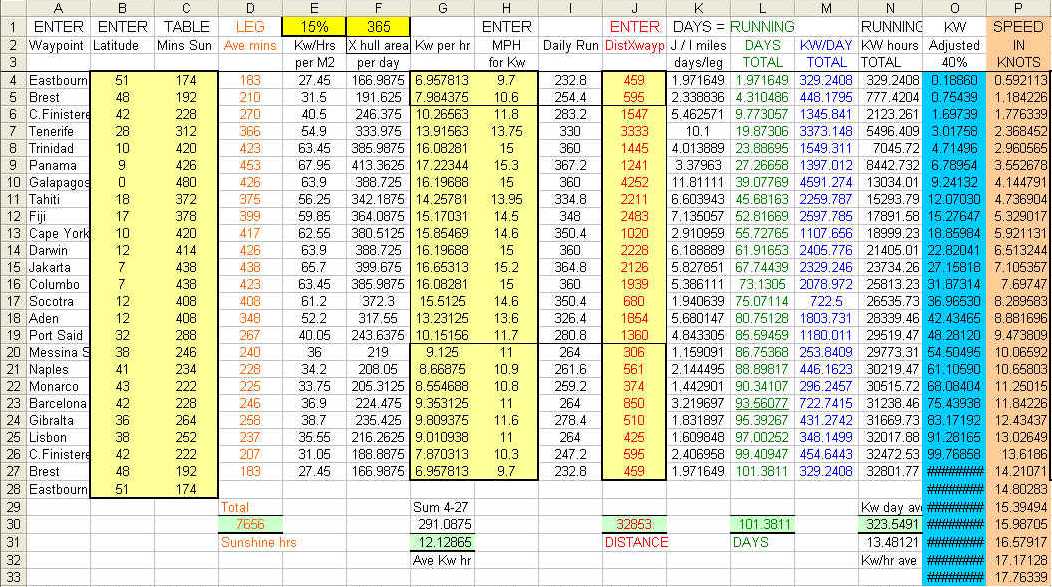
GLOBAL STATISTICS - The above Excel spreadsheet, though a good starting point does not take into account sun tracking from moveable solar panel arrays, nor is it suitable for trimaran or SWASH configurations. All of these components need to be incorporated with wind turbine generation - which of course means we need the mean wind speeds at all of the same waypoints that were used to calculate a world circumnavigation for a catamaran. That will give us a nice world model for any kind of shipping looking to move to clean energy from bunker fuels, including LNG.
This spreadsheet allows the designer to change important variables such as hull length, solar panel efficiency, harvesting area - and so on. The next generation program is to incorporate as many features as one might reasonably foresee as necessary, such as hull form variation (number of hulls and arrangement). In addition, when working with university and other technology partners, this information is sure to form part of the base command and control robotics.
THE ENTERPRISE 1 - is shown above sporting a standard Bluefish ZCC solar array that is considerably larger (almost a third) in fact borrowed from our other workshop, simply to compare and drool over. This configuration has left and right arrays as moveable wings that track the sun, with the centre panel forming part of the deck - just the same. The larger size array would work of course, but we are experimenting to keep costs down on this craft, where high performance is not the main criteria. In Phase 2, we will be conducting tests to determine if we can do away with solar tracking, or if we can get by without that feature, and use bigger wind turbine generators instead, to reduce costs. Performance is sure to be reduced, but keeping costs down may be the key to successful ocean cleanup missions.
The array for the Enterprise 1 is equivalent to 220 meters of panels. We will still have two wings to track the sun, but as you can see from the diagram above, they are smaller than the original Bluefish ZCC setup. Two-hundred and twenty meters of panels is likely to yield 42kW of energy in bright sunshine. If, as we think it is possible that our turbines can generate 20kW peak, then the total harvested electrical energy is around 60kW in ideal conditions. Averaged, that is likely to be reduced to under 30kW, some of which will be used to drive the vessel and operate the robotic machinery and computers, and the remainder to process plastic waste. The power to weight and power to drag ratios are therefore well below that of the Bluefish ZCC concept, but then this is not a performance machine, rather an ocean workhorse. The figures will be input into a similar spreadsheet that has been modified to calculate performance based on this hull design. That will give us a good indication of the speed that we might clean up the oceans - in years - rather than decades.
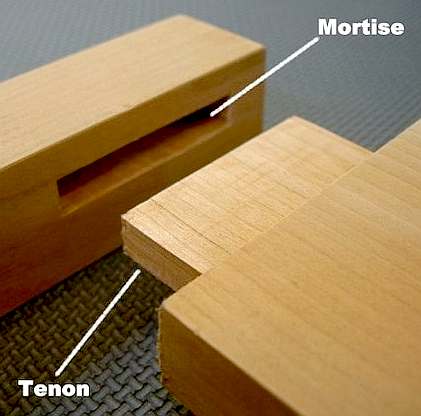
JOINERY - The panels onto which we'll mount the solar cells are made from 4mm marine ply with treated softwood frames. The design is very basic, but with small softwood sections and a 45 degree angle on the hinge side - to allow the wing to swing down and yet still fold over the deck in high winds. Instead of weakening the frames with mortises and tenons, we used steel pins in pre-drilled holes that were perfectly lined up before drilling. Then we did a dry run test fit. Modern adhesives are so strong that with the plywood skin being bonded and pinned to this frame, it will be very strong. The alternative would be honeycomb aluminum with a carbon fiber skin. The weight of each wing is 650g (1.4lbs). That's not bad considering the size, 1.3kg or 2.8 pounds in total. Add that to the 11.3kg hull and the 5.2kg for test batteries and it's starting to mount up = 17.8kg (39 lbs). It's going to get a bit heavier with pumps, wind turbines, solar cells and electronics.
CABINET MAKING - The top wing is shown here pinned and bonded. The lower wing is pre-pinned, but not assembled. They look for all the world like cabinet doors and could very well be. On the full size vessel we'll be using high strength alloys for the frame, borrowing aircraft wing techniques, possibly with some carbon fiber as a combined deck and panel onto which we can encapsulate the cells. The wings need to be light, yet strong enough to survive a tropical revolving storm (hurricane force winds), while also keeping the cells protected from seawater ingress. If weight were to become an issue and we wanted to stay with wood, we could use balsa and 2mm plywood skins on both sides of a frame. We are not using exotic materials deliberately at this stage, to prove traditional methods will work and to leave room for improvement.
From the two mirror image blanks above the next thing is to chamfer the lower outside edges with a plane and put a light bevel on the upper wing surface - then sand the whole assembly ready for sealing and painting.
SHAPING - This is what the corners/edges look like shaped and rough sanded. Note that the steel pins have also been ground down. You can do this with a file, or if very careful, with a plane using tungsten blades - but you have to move very slowly to avoid chipping the blades. Do not try this on hardened steel pins, only mild steel, brass or aluminium.
PAINTED - The solar wings also needed to be painted, to match the hull and to provide protection against the elements. These arrays will be moved by jumbo servos, coordinated by an Arduino program, to track the sun.
HINGES - The solar wings need a high degree of movement and wide spaced hinges to make that possible that are not available as a commercial product. So, we made these custom jobs from aluminium. Six blanks on the left were drilled and countersunk to make that on the right. On the full size ship we will be using some very special custom stainless steel joints - not at all like these hinges.
SOLAR ARRAY - The Enterprise 1 'proof of concept' model is seen here sporting the full monty, hinges fitted. Next comes the mechanical movement and electronics. At the moment six of the panels are partially shaded because the hinge screws needed to bite on a thicker timber underneath the wing. That will be corrected should any loss of performance be significant. We doubt that will be needed, but we always plan to rectify any identified issues - even on a model. There are 51 panels on this boat, but the pattern may need to be varied to suit standard production panels, if that is more cost effective.
FLEXIBLE PANELS - Solar panels are now available that are flexible, light and more than 21% efficient. We'll be shopping around for the best deals. You can see from the photo sequence below that to produce the best quality panels, production operatives need to work in well lit air conditioned premises. Careful attention to detail and quality control regimes ensure that the products coming off the line pass rigorous tests before being certified and shipped.
SOLAR PANEL MANUFACTURE - The above sequence shows solar cells being connected and encapsulated to make a production panel - finally loaded onto a pallet. This factory in China has a very good inspection regime. Each panel undergoes several visual inspections as it passes from one operation to another. The picture below shows the finished product fitted to a roof.
SHENZHEN SHINE SOLAR CO. LTD
PLANETSOLAR - PROOF OF CONCEPT
On the 4th of May 2012, history was made, with Raphael Domjan, at the helm of a giant of a catamaran powered only by solar panels, crossed the finishing line at Monaco to become the first electric boat to sail around the world. MS Tûranor PlanetSolar, known under the project name PlanetSolar, is (as of 2015) the largest solar-powered boat in the world. The vessel was designed by LOMOcean Design, built by Knierim Yachtbau in Kiel, Germany, and launched on the 31st of March 2010.
Planetsolar was the first solar powered boat to complete a circumnavigation using energy harvested from nature, seen here traveling up the River Thames opposite the City of London council offices.
Planetsolar passes through Tower Bridge in London, England. This solar powered boat did not have sun tracking on its main deck wings. It had a panel to the rear that could change angle, and it had slide out wings that were manually moved in and out using a sailing winch type pulley systems and ropes.
PlanetSolar in Paris - this boat gets about, proving that solar powered boats work, even if they do not have wings that automatically track the sun. Note also, that there are no wind generators.
SOLAR ARRAY CONTROL BOARDS
Here we look at two stand alone electronic design solutions for control of our wing angles. One is an analogue comparator based circuit, the other a digital computer chip based circuit. They both do the same thing, but with different features.
LM339 COMPARATOR BASED SUN TRACKER
There are many ways of arranging for an array of panels to track the sun. The description below is for a DIY control board that seems to work quite well. But there are dozens of designs from enthusiastic roboteers.
LM339 BASED SUN TRACKER DIY COMPONENT LIST
dU1/U2
- LM339 quad comparator
Circuit diagram for the LM339 quad comparator based sun tracker
Template to drill and etch your own PCB (37mm x 37mm)
The LED arrangement in the LM339 circuit below uses two rows of three LEDs with each LED connected in parallel, the two rows are connected in parallel but reversed polarity. The sensor array is made with three west LEDs and three east LEDs. A 1meg resistor and a 10n ceramic capacitor (103z) are also in parallel with the sensor. The sensor LEDs provide input voltage for two comparators on the LM339 chip with the variable resistor R2 providing a "dead zone" or sensitivity adjustment. Each comparator output is fed into a transistor Darlington pair which in turn drives the DC motor. The rail voltages are provided by two batteries connected in series with the center tap providing the ground reference.
The developers at Green Watts have tested this circuit with 2 single cell lithium-ion batteries providing +/- 4.2 volts and two 12 volt lead batteries, the LM339 is rated for input voltages from +/- 2 volts to +/- 18 volts.
Graph showing the voltage variation per cell of a solar wing at various angles - as measured by our wireman during a controlled experiment.
During the day the sun appears to move across the sky from left to right and up and down above the horizon from sunrise to noon to sunset. This is shown in the diagram above of the Sun's apparent motion as seen from the Northern Hemisphere.
MMT SCIENTIFIC KIT
This special computer chip controlled solar tracker circuit kit (Catalog #ST2-HD-PIX) from MTM Scientific is a product they made available on a limited basis for advanced electronic hobbyists. Identical in function to their other Solar Tracker Kits, this kit contains all the electrical components for building the circuit (shown above) to automatically find and follow the sun across the sky.
Just like their other kits, this tracker circuit finds the sun at dawn, follows the sun during the day, and resets to home at nightfall for the next day. This kit is ideal for driving a single axis solar tracker with a 12 VDC gear motor or linear actuator that they don't provide. Also included, but not shown, are the same 2 photocell sensors, 2 limit switches and 20+ page booklet they include with all their Solar Tracker Kits.
So what is different about this kit? This new version of our Solar Tracker Kit is controlled by a PIC micro-controller running a computer program written in PICAXE BASIC. Much more information about the Picaxe family of micro-controllers is available at Phil Anderson's website (www.phanderson.com). The Picaxe Chip can be reprogrammed using the serial port of your computer using the Picaxe Development Platform Software (Download and Installation required). Obviously that would be a project for advanced hobbyists capable of reading and writing computer line code and reading circuit diagrams. MMT provide the Picaxe chip already programmed for this kit.
PICAXE computer chip based sun tracker kit
SUN TRACKER COMPUTER - Solar energy is rapidly gaining importance as a means of expanding renewable energy resources. As such, it is vital that those in engineering fields understand the technologies associated with this area. Our project will include the design and construction of a microcontroller-based solar panel tracking system using popular boards such as the Raspberry and Arduinos. There are many other cheaper solutions if you don't need a fully integrated ship system (with data logging) where a Pi or Arduino would be massive overkill in computing power - see the links at the foot of this page. Solar tracking allows more energy to be produced because the solar array is able to remain aligned to the sun. This system builds upon topics discussed in the build of the SeaVax proof of concept boat. A working system will ultimately be demonstrated to validate the design. Problems and possible improvements will also be presented.
A Solar Tracker is a Device which follows the movement of the sun as it rotates from the east to the west every day. The main function of all tracking systems is to provide one or two degrees of freedom in movement. Trackers are used to keep solar collectors/solar panels oriented directly towards the sun as it moves through the sky every day. Using solar trackers increases the amount of solar energy which is received by the solar energy collector and improves the energy output of the heat/electricity which is generated. Solar trackers can increase the output of solar panels by 20-30% which improves the economics of this solar powered boat.
The sun travels through 360 degrees east-west a day, but from the perspective of any fixed location the visible portion is 180 degrees during a 1/2 day period. Local horizon effects reduce this somewhat, making the effective motion about 150 degrees. A solar panel in a fixed orientation between the dawn and sunset extremes will see a motion of 75 degrees on either side, and thus, according to the table above, will lose 75% of the energy in the morning and evening. Rotating the panels to the east and west can help recapture these losses. A tracker rotating in the east-west direction is known as a single-axis tracker.
The sun also moves through 46 degrees north-south over the period of a year. The same set of panels set at the midpoint between the two local extremes will thus see the sun move 23 degrees on either side, causing losses of 8.3% A tracker that accounts for both the daily and seasonal motions is known as a dual-axis tracker. For our purposes dual axis tracking is not economic in terms of complexity for returns.
TABLE - The energy contributed by direct sunlight drops off with the cosine of the angle between the incoming light and the panel. The table above shows: Direct power lost (%) due to misalignment (angle i)
MMT FEATURES
1) The Tracker has a FAST/SLOW update rate limit which only allows position changes once every 1 minute, or once every 10 minutes. This feature reduces wear and tear on the mechanical and electrical hardware.
2) The Tracker has a software feature which requires all motion updates to be of 1/10 second duration or more, to reduce 'jogging' and 'hunting'... essentially software controlled hysteresis.
Advanced hobbyists might consider writing code to do optimized sunlight threshold detection, smart parking, historical data analysis, bright cloud ignore, heliostat applications and just about anything imaginable, to improve energy harvesting. MMT are interested to know about any code improvements.
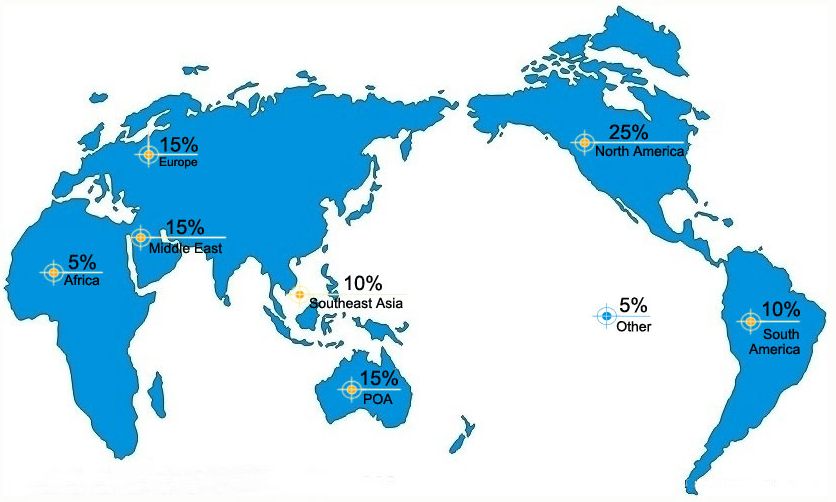
SOLAR DATA - Chart giving approximate insolation figures from around the globe. It's not rocket science, it's just taking the time to assimilate and interpret data from around the world. You can take this information and add it to a similar chart for ocean winds, and that would be the basis of a live Excel or other program - such as MathCad. We won't be needing this information for our 'proof of concept' model. But, it's nice to know that we have it at our fingertips for the real thing. In the picture below you can see the mast that carries the wind turbines way out in front on the vessel, so as to prevent shading. the secret here is automation (robotic controls) to keep a SeaVax working at peak efficiency in changing circumstances - just like any good captain would.
SUN TRACKING MOVEMENT - Keeping things as simple as we can to prove the concept, we'll be using some beefy R/C servos to do the grunt. We made a test rig out of a softwood spar, with an aluminium cradle that we could slide along the spar to easily change the angles. For test purposes, we drilled holes in a piece of scrap steel in Meccano (Frank Hornby) fashion to use as an adjustable connecting rod, to see what length works best. This rod mates with a simple steel angle bracket, with extra holes drilled to allow us to spread the load where it attaches to the wing underside with screws. We'll run this rig for a while and when satisfied with the movement, we'll re-make dedicated parts in stainless steel - possibly with better load distribution. Each wing has its own servo and each wing tracks the sun independently - in theory, although the sun will be coming from the same angle for both wings. On the full size ship we'll be using hydraulic actuators - if these tests prove a significant energy harvesting increase - and that is more than likely to be the case - especially in a dynamic situation.
IT'S ALIVE - These large RC servos are rated at 20kg. The active wings are the first part of this robot to mimic a lifelike action, as in a very basic artificial intelligence searching for energy (food), just the same as a plant grows to face the sun and angles its leaves for the same reason. Artificial intelligence is where one program is allied to another and another, in increasing complexity, until the robot, in this case an ocean going vessel, is able to make intelligent choices in carrying out a mission. A mission being either a software driven program, or a mixture of computer controls and human decision making. In this case the mission is to clean up plastic from the oceans.
FACE THE SUN - This boat automatically aligns its wings toward the sun. During the Darwin to Adelaide solar car races, teams quite often tilt their solar arrays toward the sun when parked by the roadside at the end of a day's driving, when, if not aimed toward the sunset horizon, their cars would not be replenishing their batteries ready for a better charged morning start.
LINKS
vafusa hydrocyclone separators Vortex depollution products shredders pet bottle perforator RE UK Simple Analog Solar Tracker Concept http://www.reuk.co.uk/Simple-Solar-Tracker-Concept.htm http://en.wikipedia.org/wiki/Mortise_and_tenon http://www.vortexdepollution.com/products/shredders/shredders/pet32-perforator http://www.forrec.eu/dual-shaft-shredders http://www.machinerydata.com/PlasticLumber.htm http://www.ksb.com/giw-en/ http://www.hydrocyclone.com/ http://en.wikipedia.org/wiki/Hydrocyclone https://www.vafusa.com/hydrocyclone-separators.htm
Youtube
ACIDIFICATION - ADRIATIC - ARCTIC - ATLANTIC - BALTIC - BERING - CARIBBEAN - CORAL - EAST CHINA ENGLISH CH - GOC - GULF MEXICO - INDIAN - IRC - MEDITERRANEAN - NORTH SEA - PACIFIC - PERSIAN GULF - SEA JAPAN STH CHINA - PLASTIC - PLANKTON - PLASTIC OCEANS - SEA LEVEL RISE - UNCLOS - UNEP WOC - WWF
Our love affair with plastic is choking the oceans. Once people know about it, they want to stop it. But how and who might that be possible? BMS has teamed up with the Cleaner Oceans (Planet) Trust to raise funds to build and test a full size prototype. Cleaner Planet Trust is a charitable, not for profit organization governed by Trustees.
Various low cost digital solar tracking boards, from £16 - £25 for single axis solutions - plus postage and packing. And some higher output analog circuit boards from £18 - £29. It is a simple matter to increase the amperage and/or voltage by using relays. It's also possible to use remote sensing heads that SBE sell as accessories.
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
This website is Copyright © 2015 Bluebird Marine Systems Ltd. The names Bluebird™, Bluefish™, SeaNet™, SeaVax™ and the blue bird and fish in flight logos are trademarks. CONTACTS The color blue is a protected feature of the trademarks.
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||