|
PLASTICS
MILL - The SeaVax project
is an opportunity to open up robotics to new fronts.
Our treatment system involves identifying plastic in seawater, such as to
be able to engage the appropriate onboard machinery, hence operate these
giant ocean dustcarts efficiently, without harming fish
or marine mammals. The picture above is of one of our
first test, 'shredding heads.'
GET
INVOLVED - We'd welcome ideas and practical experimental
input from hobbyists, schools, colleges and universities. If you would like to get
involved please email the SeaVax project manager, Chris, using our contacts
page.
The
wonderful thing about electronics, is that you can control and measure
almost anything using the myriad of existing components. There is an army
of clever engineers always looking for something to solve. In this case
there are already sensors and processors potentially suitable for our needs. Our vacuum head
simply has to be fitted with a good array of sensors and the information
gained from those sensors fed to
a computer via a program that can make sense of the incoming signals and
translate that into the appropriate actions. CONTROLLING
THE MULTI-STAGE
HARVESTING HEADS The
several stages of identification and waste treatment can all use the same,
or repeater sensor heads, provided that the controlling program is set up
for multiple inputs and outputs. We do not want to reveal how this might
be achieved just yet, but will do so once proprietary rights are formally lodged
for a system derived from this research. We anticipate an application to the
appropriate body either late this year, or early in 2016. Unfortunately,
we are an SME startup. Without any trading to support this research we
cannot yet proceed - it is such a shame for the ocean where pollution
continues unabated. Hopefully, we will secure development associates
shortly.
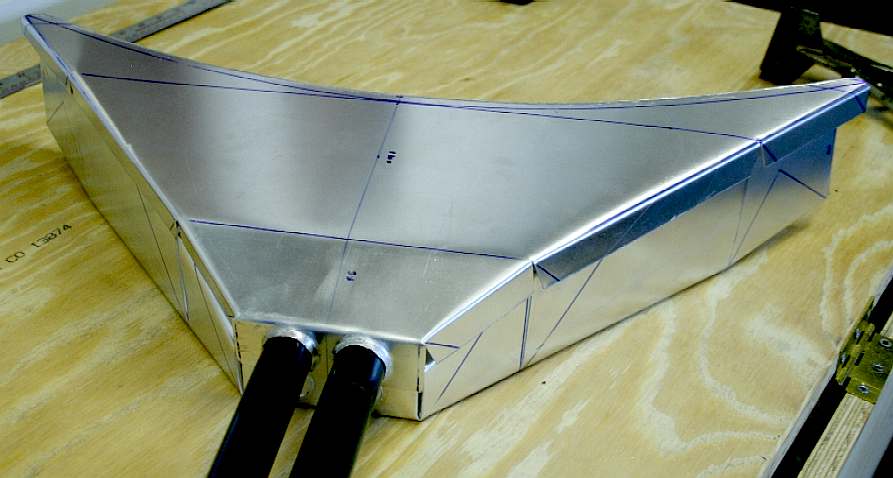
MOUTH
OF THE MANTA
RAY - You can see from the shape of the collector head and throat size
in proportion to body width and length, why the prototype SeaVax is to be
christened the Manta
Ray. The sensors can be placed at the far tips of this head, to as it
were, get the wildlife that we need to protect in a beam crossfire.
Additional surface detectors can be used to identify whales, dolphins
and seals.
Or, indeed, anything floating, as in animals trapped in fishing nets.
SAFETY
SCOOP and SCREENING We
don't want animals such as fish or
marine mammals entering the system. That means
installing sensors to stop machinery dead. In advance of anticipated
shutdown, a system of deterrents will be deployed to ward off unwary
animals. Some smaller organisms can pass through the filtration systems
unharmed. The idea of using computers is that they are lightning fast, so
can react to ocean conditions very fast.
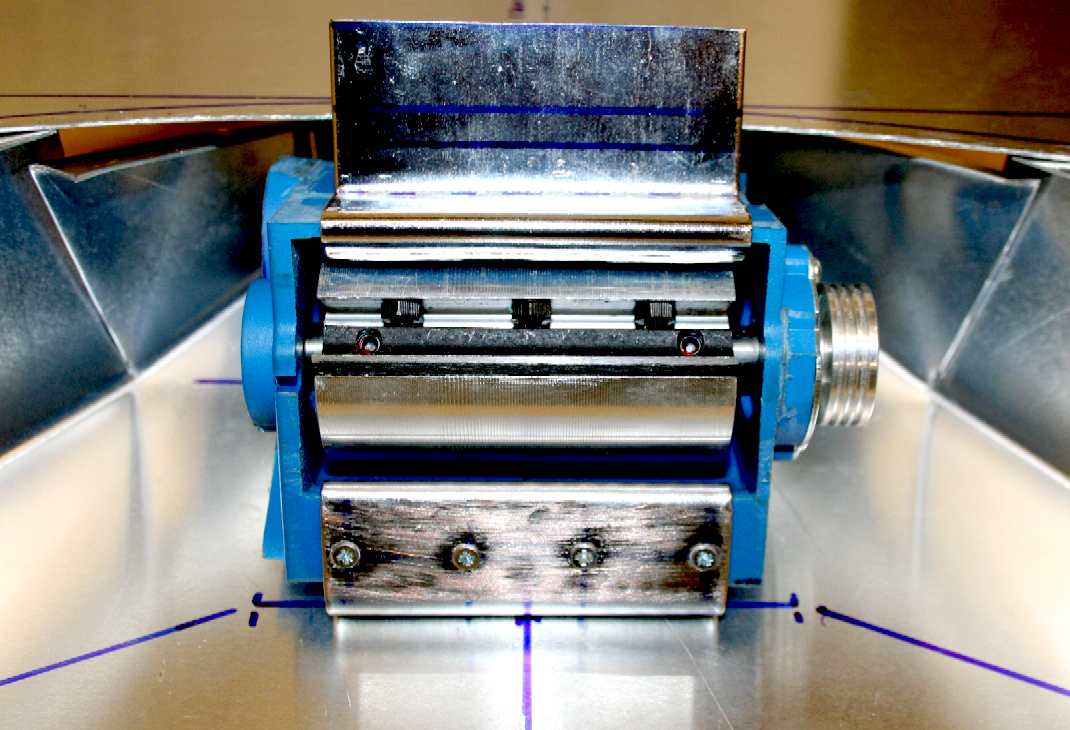
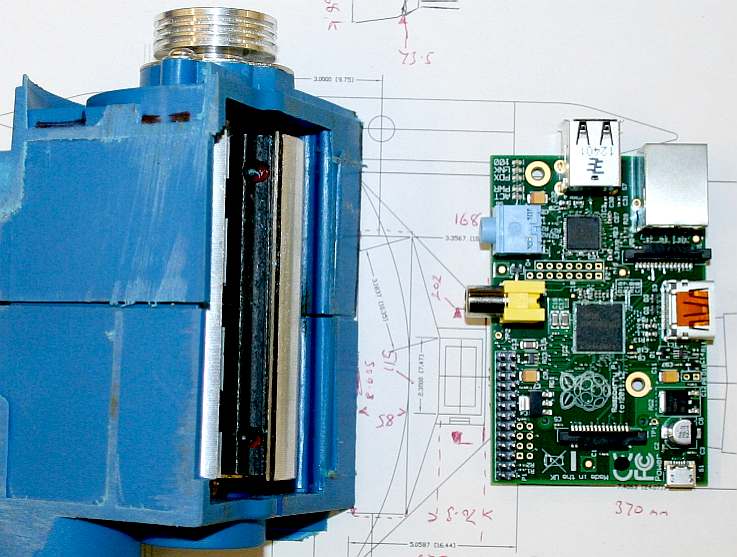
JULY
2015, MK I SHREDDER MOUNTINGS - This
mill cuts plastic entering the mouth at the top and at the bottom of the
openings on either side of the rotating drum. In power wood planes, using
similar drums, they only cut at the leading edge. How this design manages that
is proprietary information. We can also reverse the blade rotation to clear blockages.
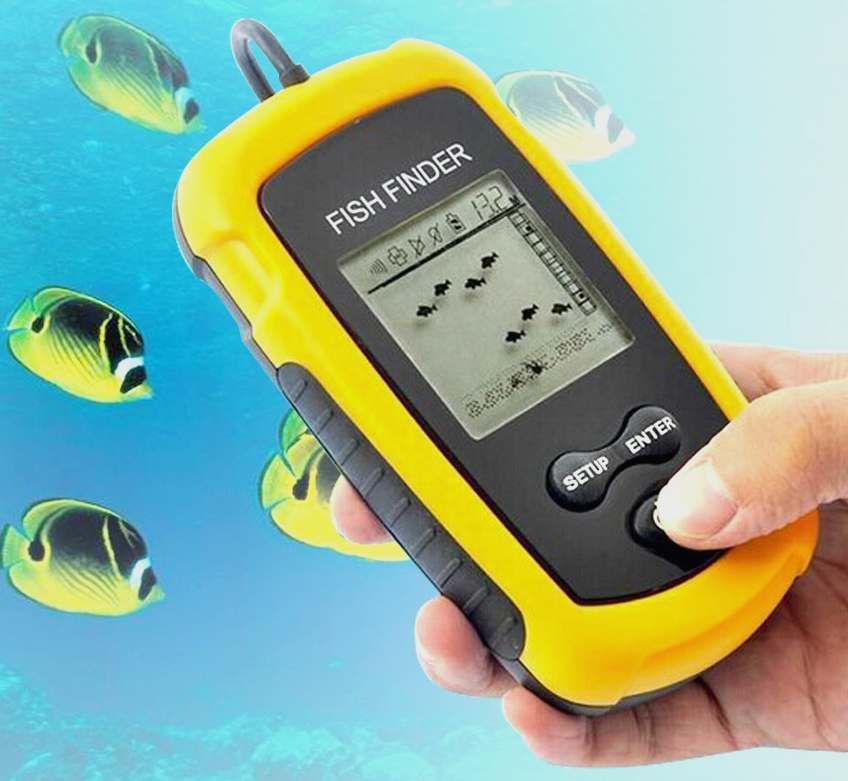
SONAR
FISH FINDER - At the ranges we are looking at for the proof of
concept model, this low cost sonar instrument could be just what we are looking
for to be able to conduct our first experiments.
On the full size ship, we are bound to need higher definition and more
precise computer identification via appropriate programming and algorithms.
But for a 2 meter boat that will only be used on rivers and lakes, a 45 degree
angle beam aimed appropriately (forward and down) is likely to give us enough information to be
able to shut down the shredding head in time to save any fishes from harm. The
range on this unit can be set to 2 feet (610mm) ahead of the SeaVax proof of
concept vessel.
INFRA
RED - Could be useful as a failsafe. Over short distances, even clean water absorbs red and infrared
light strongly, with intensity dropping exponentially I=I0e−αx, and α being in the vicinity of 0.01−0.1cm−1 (depending on frequency).
This might be a problem for model receivers where it is ok getting an intensity which is, say, 1/100 of the normal intensity, you could calculate a maximum distance between receiver and transmitter being perhaps 0.45 – 4.5 meter
(depending on the frequency). If the receiver is only a tenth of that sensitivity,
you can halve those distances. But, this general rule means that for our
SeaVax proof of concept model, we might use infrared sensors to detect some
fauna.
For more advanced warning (greater distances) we will be looking at shorter wavelengths,
into the visible spectrum, or even better: blue light, which would give us some two orders of magnitude in range
disregarding, of course, silt and other particles in the water, which will
interfere.
SONAR
- SOUND NAVIGATION and RANGING Some sonar systems are especially designed to locate fish. These systems use the same basic principle as other sonar systems - they transmit sound pulses, measure the time it takes for echoes to return, and calculate the distance to the objects.
Fish finding sonar units send and receive signals many times per second. They concentrate sound into a beam
(or cone) that is transmitted from a transducer in the water. The beam width
or angle can be 1.5 - 90 degrees.
Fish finders operate at high frequencies of sound, approximately 20-200 kHz (20-200,000 cycles per second). This helps define targets and can even display two fish as two separate echoes or arches.
Lower frequencies (i.e. 50 kHz) can penetrate deeper waters but may not be able to define individual targets. Putting more energy into the pulse sent out by the transducer increases the probability of getting a signal to return in deeper water.
Fish that swim within the signal cone may reflect some of the sound back to the transducer. The reflected sound, or echo, appears on the sonar's chart display. A school of fish will appear as many different shapes or formations, depending on how much of the school is within the transducer's cone. Individual fish, especially those in deeper water, may appear as arches
(see above animation) on the display. Fish
finding sonar is typically aimed under a boat and forward. With the SeaVax
head, we want to know what is dead ahead of the ship, inline with, or to a
depth where moving fish that might enter the vacuum
head on their present course - are detected. 
ADVANCES
IN SONAR 1948 - 2000
Dual beam acoustical methods, first developed in fisheries research in the 1970s, have been refined to allow the resolution and analysis of echoes from individual animals such as members of the small macrozooplankton. Using this technology, the capability of estimating the acoustical distribution of a zooplankton and micronekton assemblage was developed.
The underwater acoustic sensor BIo-Optical Multi-frequency Acoustic and Physical Environmental Recorder (BIOMAPER), developed at WHOI in the mid-1990s, represented a significant advance in the use of acoustics to study marine invertebrates. In its initial form, transducers operating at 120kHz and 420kHz allowed the detection of organisms with characteristic acoustic cross sections on the order of centimeters. This meant that the acoustic device was detecting herbivores, euphausids mysid shrimp, Penaeidae shrimp, primary carnivores, and small fish. Efforts to improve the system led to the use of seven different frequencies, 38kHz, 43kHz, 120kHz, 200kHz, 420kHz, 1MHz, and 2MHz in BIOMAPER II. This refinement along with the ability to vary the depth of the tow fish depth greatly enhanced the capability of acoustically sampling a wider range of trophic levels including at least some of the primary producers, planktonic algae.
Between 1948 and 2000, the use of acoustics in fisheries biology increased rapidly. In 1948, Fururno Industries (Japan) began to market fish finders to the commercial fin fish industry. In Europe, the Kongsberg Simrad Corporation also marketed an increasingly sophisticated line of SONARs with vertically steerable beams, multiple beams, and multiple frequencies, specifically tailored to the needs of fishermen seeking fin fish in the North Atlantic Ocean and adjacent seas.
The strength of the echo from the fish may be used to infer both the quantity of fish and, in some instances, the species. The echo sounder may be single beam configuration, dual beam configuration with the transducers in a circular pattern, or a split beam configuration with the transducers divided into quadrants. The dual beam configuration allows the observer to determine the angle of the targets, fish, to the axis of the beam. The split beam configuration allows the observer to determine the angular position of the target, fish, to the observer. If the echo sounder has a single beam, the target strength and range may be displayed. If the echo sounder has a dual beam configuration, the target strength and relative angle to the axis of the beam are displayed. A split beam configuration allows the display of target strength and relative position to the echo sounder.
The combination of side scan SONAR and echo sounder gives rise to the multibeam SONAR (generally exploiting the Mills Cross arrangement of a projector and a line hydrophone array) for high-resolution, three-dimensional sensing of fish populations. Using computer data analysis methods, it is possible to construct a three-dimensional image of fish schools. This allows the fisheries biologist to determine the length, width, vertical dimension, and position in the water column of a school of fish that has been detected. We are interested in the avoidance behavior patterns of fish, and avoiding fish - but this may not be practical - where simply stopping the machinery until a school of fish is gone, is simpler. KISS.
From the 1970s inexpensive computers and modern digital electronics have greatly increased our ability to collect, analyze, and display acoustical data. The fundamental measurement remains a time series of voltage. The grand challenge is interpreting and translating these signals into information useful for scientists in the quest to clean the oceans.
The reflected sound from air in the swim bladder of fish has been found to account for 90% of the total energy backscattered by a fish depending on the frequency being used. Developing a viable means of using acoustic data to identify different taxa was recognized as one of the great challenges to the use of
SONAR in fisheries biology and marine biology research. Members of the zooplankton do not have a swim bladder and so can be differentiated from fish by using multiple frequencies. 12kHz, 18kHz, and 38kHz are particularly useful for identifying macroscopic fish, whereas 120kHz and 200kHz are useful for zooplankters such as krill and shrimp. 3D SONAR (Raymarine) is when your transducer sends out a really high-frequency beam that gets you
much better returns than a traditional SONAR. From Lowrance this is known as DownScan Imaging and from Humminbird as Down
Imaging. This technology uses a frequency of 455/800 kHz that will show you an incredibly photographic
like image of the underwater world. The beam angle will be much narrower (25 degree wide
band and 1.4 degree narrow fan beam) though, which means you will see a tighter
spot focus, and the maximum depth will also be less. This isn’t a problem if your
target fish live in 150-200 feet of water. The image below has traditional SONAR on the right and Down Imaging on the left. 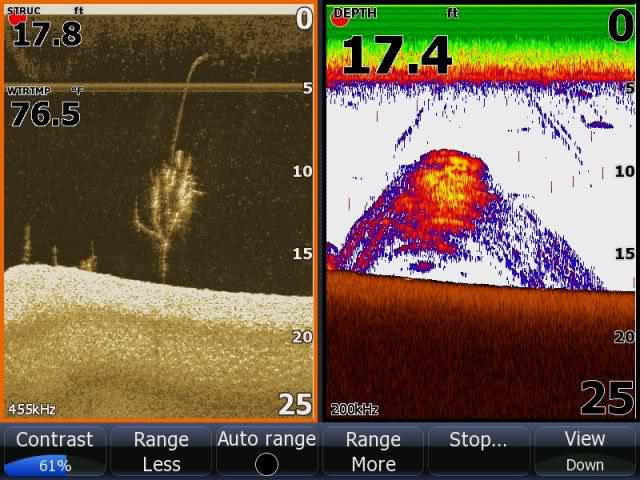
SEAVOLUTION As
with most engineering development, the final configuration of the SeaVax is guaranteed to be very far removed from
anything that we publish before IP rights are applied for. We can say that
because the design has already evolved significantly, as we have
identified and overcome problems that could not possibly have been
anticipated, save for experimentation, compared to our first
jottings from January 2015.

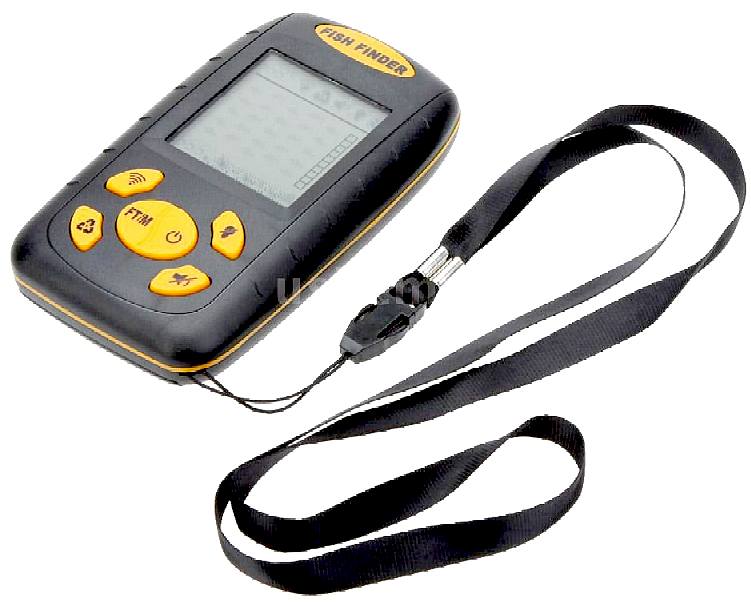


LOW
COST SONAR
FISH FINDERS - If you look on Ebay you will find a variety of low
cost hand-held fish finders from China.
They all appear to be based on the same display with similar specifications.
There are two kinds of transducer head, wireless and wired with different
specifications. With the advent of low cost digital equipment like this, even
companies devoid of a Horizon or other state granted development budget, may
experiment.
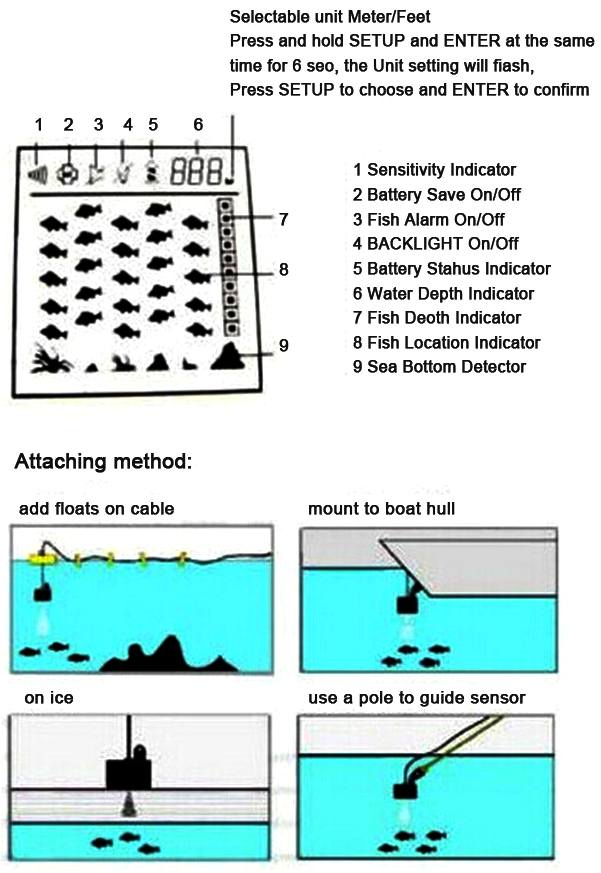
IDEAL
- This amazing product is especially designed for amateur fishermen to find out the location of fish, depth and bottom contour of
the river, lake or ocean. The unit is good for detecting schools of fish in any particular area.
Features: Wide and clear LCD display - Depth readout from 0.6 to 100m - Fish
alarm - Battery save mode - Selectable sensitivity. - Fish depth scale - Water temperature indicator.
Specifications: Display type: TN/ANTI-UV LCD - Display size: 4.3 * 4cm / 1.7 * 1.6in
Backlighting: White LED - Power supply: 4-AAA alkaline batteries (Not included)
- Measure unit: feet / meters - Sensor beam angle: 45 degrees - Depth range max: 100M / 328Ft
- Depth range min: 0.6M / 2Ft - Operational temperature: (-10-70) - Main body size: 12 * 7 * 2.5cm / 4.7 * 2.8 * 1.0in
- Main body weight: 119g / 4.2oz - Total weight: 450g / 15.9oz
Package size: 27 * 16.5 * 6cm / 10.6 * 6.5 * 2.4in - Package weight: 550g / 19.4oz
Package List: 1 x Fish Finder - 1 x Round Transducer & 25ft Cable - 1
x Transducer Adapter - 1 x Stainless Bolt - 1 x Stainless Wing Nut - 1 x Neck Strap
- 1 x User Manual (English)
FARSOUNDER
FORWARD FACING SONAR It could be a navigator's dream to be able to 'see' what lies ahead underwater and now a new type of forward looking sonar offers this possibility. US company, Far Sounder is now offering forward looking sonars with an extended range.
Forward looking sonars are not new. British company Echo Pilot has been offering units suitable for small vessels for many years and they were pioneers in developing 3D images of what lies ahead. Major electronic companies like Simrad now have forward looking sonars in their portfolio. All of these units tend to have a very limited range measured in 10's of metres ahead of the vessel which gives limited time to take avoiding action if danger is sensed ahead of the vessel. 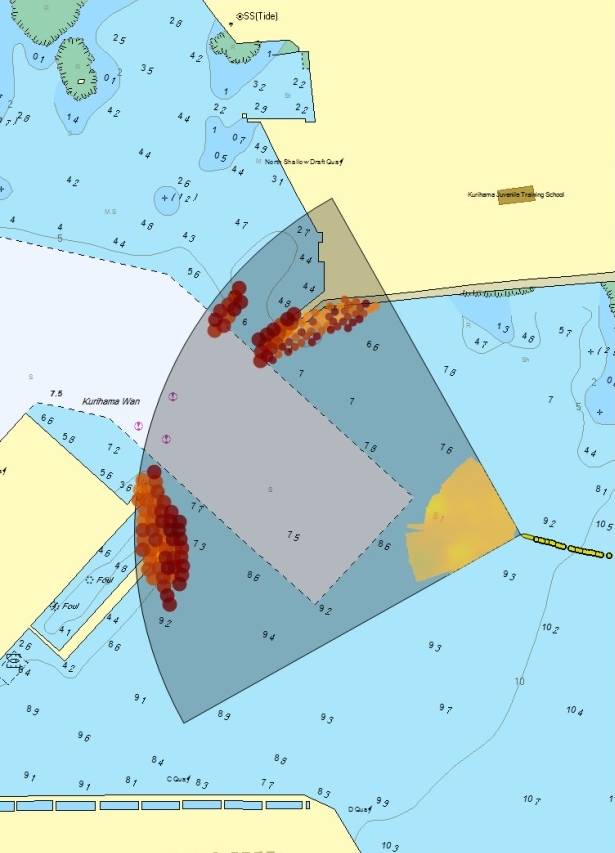
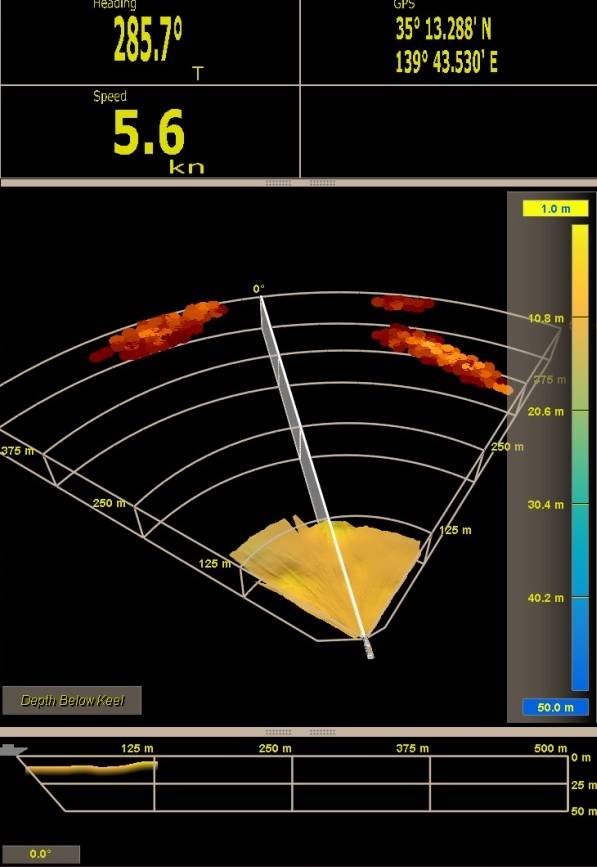
The Far Sounder units come in two sizes, the 500 and the 1000. The 500 has a range of 500 metres ahead of the vessel and it spans an arc of 90°, which is 45° on either side of the bow, adequate for most navigation functions. The 1000
as the name implies has double this range. The transducer incorporates 100 individual units so that one simple ping from the transducer can span the whole area ahead of the vessel and create the display. Sophisticated software allows the returned signals to be translated into colour coded 3D displays. Far Sounder has developed a unique 3D colour display that can be shown on a separate screen or they now offer the facility for this to be displayed as an overlay on the electronic chart. This overlay allows underwater targets to be related to what is shown on the chart which can help identification.
It is also possible to track ships with this forward looking sonar which could be a good supplement to radar but this aspect of the unit is not
emphasized because of limitations imposed by US export laws. A spokesperson for Far Sounder
is quoted as saying: "Our technology capabilities do include vessel tracking but we do strive to keep our commercial products exportable without a licence as much as we can." This probably refers to the potential for tracking underwater craft.
The transducer units can be installed in a bulbous bow or incorporated into a conventional sharp bow shape. Far Sounder has developed a number of alternatives but they only work on displacement hulls as the transducer has to stay in the water for it to work. The transducer for the 500 unit can remain working at speeds up to 20 knots whilst this can be extended to 25 for the larger 1000 unit. The transducers can form part of Far Sounder's Diver detection System to perform a double role.
The ability to see what is underwater ahead of a ship opens up a new dimension to navigation. Whilst modern radars have a tremendously improved ability to detect targets they can still be challenged to detect small craft in rough seas. This system from Far Sounder adds an alternative detection method that could help to compensate.
FarSounder's
approach to sonar system design is fundamentally different to other sonar technologies. The solution FarSounder's technology provides is the ability to deal with multi-path and water depth issues, allow for fast refreshes, and create a large field of view with single pings, all in a small cost effective package. FarSounder's approach does not hurt marine life and can be used as a
marine mammal ship-strike mitigation device.
FarSounder's single ping, 3D sonar approach enables the system to overcome traditional Forward Looking Sonar limitations such as Multipath Interference, Shallow Water Operation, Roll/Pitch Compensation, Surface Effects and Ship Motion.
Without 3D capability, Forward Looking Sonars are unable to easily compensate for roll and pitch without large amounts of expensive hardware. Even in these cases, 2D roll and pitch compensation is marginal at best. FarSounder's technology is capable of compensating for roll and pitch entirely in software with a simple, inexpensive roll and pitch sensor. 
FAR
SOUNDER CONTACTS & UK DEALERS FarSounder, Inc.
151 Lavan Street
Warwick, RI 02888
USA
t: +1 401 784 6700
f: +1 401 216 8390
e: info@farsounder.com Telemar (UK) Ltd.
Dorking,
5 Tillingbourne Court, Dorking Business Park
Dorking, Surrey
United Kingdom
Contact Person:
Sally Cust
Phone: +44 1306-883355
Email: Sally.Cust@telemar.co.uk
Web: www.telemaruk.com
L-3 Marine Systems UK Ltd
920 Hempton Court Park Avenue Aztec West
Bristol
United Kingdom
Contact Person:
Tom Henson-Webb
Phone: +44 01454 625 800
Email: Tom Henson-Webb
Web: www.L-3marinesystems.co.uk http://www.farsounder.com/


LINKS
Wikipedia
Apollo_Guidance_Computer
Wikipedia
History_of_computing_hardware
Amazon
Fei-LQ-01001-ELECTRONIC-SONAR-FINDER
https://www.youtube.com/watch?v=HsIKey-q2JU
Maritime
Journal news Aug 2015 onboard systems communication a new way of navigating
Transas
FarSounder
2D_vs_3D_processing
Farsounder
http://www.transas.com/
http://www.farsounder.com/technology/2D_vs_3D_processing
http://www.maritimejournal.com/news101/onboard-systems/navigation-and-communication/a-new-way-of-navigating
http://www.amazon.co.uk/Fei-LQ-01001-ELECTRONIC-SONAR-FINDER/dp/B003FGZ5CE
https://www.youtube.com/watch?v=HsIKey-q2JU
http://www.solarnavigator.net/alcan_aluminum_alloys.htm
https://en.wikipedia.org/wiki/Aluminium
https://en.wikipedia.org/wiki/History_of_computing_hardware_%281960s%E2%80%93present%29
https://en.wikipedia.org/wiki/Apollo_Guidance_Computer
http://www.ksb.com/giw-en/
http://www.hydrocyclone.com/
http://en.wikipedia.org/wiki/Hydrocyclone

Our
love affair with plastic is choking the oceans. Once people know about it,
they want to stop it. But how? The next question is who?
Obviously, if any of the researchers involved so far had come up with a
solution, they would have
sorted it years ago. We are a practical think-tank fresh to the issue and
without a budget. We hope to be able to
collaborate with other marine organisations that are funded for this work,
or who have funds to investigate viable projects. You cannot donate to us
directly on this site, but we hope to identify partner sites shortly where
you can support a project much like that proposed herein, or better still,
our own practical experiments. Volunteer
Careers.
ACIDIFICATION
- ADRIATIC
- ARCTIC
- ATLANTIC - BALTIC
- BAY BENGAL - BERING
- CARIBBEAN - CORAL - EAST
CHINA
ENGLISH CH
-
GOC - GULF
GUINEA - GULF
MEXICO
- INDIAN
-
IRC - MEDITERRANEAN -
NORTH SEA - PACIFIC
- PERSIAN GULF - SEA
JAPAN
STH
CHINA - PLASTIC
- PLANKTON - PLASTIC
OCEANS - SEA
LEVEL RISE - UNCLOS
- UNEP
WOC
- WWF
Youtube
fish finder
|