|
TITLE:
AUTONOMOUS VESSEL ROBOT AI SYSTEM
A boat, ship, or robot
vessel, that by virtue of a combination of the technology described
herein: computers, sensors, navigating equipment, terrestrial radio and
satellite communications, mechanical, electrical and hydraulic actuators,
photovoltaic arrays and wind generators/turbines and/or optionally,
multi-hull design, is capable of superior course keeping and of navigating
the high seas at speeds typically between 5 and 10 knots using only energy
harvested from nature and without the aid of a human captain, or any other
human sailors onboard the vessel, in a manner that such truly autonomous
vessel is able to calculate, plot and execute course keeping that utilises
energy for propulsion more efficiently, and where the autonomous
navigation system is compliant with the Collision at Sea Regulations ([COLREGS] as apply to all vessels) and other rules of the oceans and
harbours, as imposed by international agreements and treaties, and local
port authorities when entering ports/harbours, docking or leaving harbours
– utilising the onboard artificial intelligence thus created.
PATENT DESCRIPTION: AUTONOMOUS VESSEL ROBOT AI SYSTEM
SUMMARY or OBJECT OF THE INVENTION
It is the object of the present invention to provide a truly autonomous platform for ocean going marine unmanned vehicles which platform addresses the limited performance of prior art unmanned surface vehicles proposed for: research exploration, warfare, other persistent monitoring applications at sea and cargo or passenger vehicles. The platform is to provide extended endurance at practical speeds, 365 days a year and 24 hours a day operation or as required, programmed or reprogrammed en-route, taking advantage of the collision regulation compliant navigation system and artificial intelligence for superior navigation and course keeping.
BACKGROUND FIELD OF THE INVENTION
The present invention relates to manned robot assisted vehicles (RAVs) and unmanned, autonomous, waterborne vehicles for marine use, herein referred to as unmanned surface vehicles (USVs) or unmanned underwater vehicles (UUVs). In particular, although not exclusively, the invention relates to unmanned surface ocean vehicles utilising renewable energy, sourced in a manner which enables extended periods of operation at respectable velocity, for remote ocean surface and subsurface surveillance and survey, as may also be developed for, or applicable to cargo and passenger vessels, which requires a level of artificial intelligence.
DISCUSSION OF THE BACKGROUND ART
Ships, boats and other waterborne navigable vehicles frequently sink or run aground due to poor course or expedition planning and monitoring. In particular human error is to blame for many sinkings, such as the
Costa Concordia and
Baltic Ace tragedies in 2012, both of which were caused by human error.
The bridge of most modern ships and many larger yachts and fishing boats are well equipped with: radio, gps, sonar, radar, chart plotter, autopilot, weatherfax and the like, some of which is integrated, but still vehicles that are so well equipped fail to follow the best navigable course to their destination and worse, collide with other waterborne vehicles.
Even with so many electronic aids to navigation, captains of ships do not know where other ships are headed and cannot react to the discovery of a vessel on a collision course or the fact that an intended harbour destination may not have a berthing place for them, until discovery by radio lookouts, direct radio communications or radar contact. Such discovery is dependent on a
vessel's crew noticing electronic warnings or radio communications and taking/making the appropriate course correction, or speed reduction, to include giving appropriate signals according to the collision at sea regulations.
Commercial shipping in particular would benefit from a higher degree of automation aboard their vessels; such that the vessel itself might take the appropriate avoidance action, speed adjustment, or course correction autonomously for the safety of the vessel, should for any reason the human crew fail to respond. At the very least an artificially intelligent computer based system might give powerful visual and audible warning to any human crew, alerting them to any impending danger. Such a system may be optionally engaged by the human operators or owners. The problem being that no such system exists at this time where traditional navigation instruments/aids and engine controls are not designed for the purpose of autonomous running.
Military, governmental and commercial civilian uses for USVs in warfare, exploration, research and monitoring applications at sea are manifold. The ability of conventional platforms, such as boats, ships and buoys, to gather data and information in these applications is limited by the platform’s endurance, typically limited by diesel fuel capacity and/or battery capacity, particularly when compared to the vastness of the world's oceans. Ships are expensive to build, crew, fuel and operate. Buoys, free-floating or tethered, provide only local Ocean monitoring coverage. Oceanographic data may be gathered remotely by expensive earth orbiting satellites but the information gathered thereby is limited in definition and scope.
Sensors and instruments commercially available today to gather oceanographic and hydrographic data and information as deployed on conventional military and civilian scientific survey vessels and UUVs are well developed and capable. Modern radio and satellite communications and information technology may be used to fully exploit such onboard instruments and sensors, as described in U.S. Patent Number:
5,894,450, attributed to Schmidt et al. However, it will benefit such exploratory missions if the cost of such operations is reduced by incorporating said sensors and instruments onto a vehicle platform that is inexpensive to run by virtue of the ability to utilise free energy from nature effectively.
Conventional unmanned surface vehicles, such as that described in U.S. Patent Number:
5,713,293 attributed to Shiffler et al., or the Spartan "scout" vehicle proposed by the US Naval Undersea Warfare Centre of Newport, Rhode Island, USA, typically employ conventional fossil fuelled power units that limit range and endurance to the size of a vehicle’s onboard fuel tanks. Conventional unmanned surface vehicles and drones operating in a semi-autonomous mode are also subject to the threat posed by collision or close encounters with larger vessels and cannot provide other vessels they encounter with the correct international collision warning signals as prescribed by the Merchant Shipping (Distress Signals and Prevention of Collisions) Regulations
1996, bringing into force the Convention on the International Regulations for Preventing Collisions at Sea
(1972), as amended by the International Maritime Organisation with Resolution A.910(22), the latest amendments coming into force internationally in November 2003.
The use of solar energy to supplement conventional energy sources, such as fossil fuels or wind energy, for marine vessels has been demonstrated by International Patent Publication Numbers: WO 98/21089 and
WO2005/012079 attributed to
Robert Dane et al, which describes rigid wings that are used as sails incorporating on their foil surfaces photovoltaic solar panel arrays. This/these system(s) though is/are constrained as to effectiveness by incorporating the wind and solar energy collector elements as one in a solar/wing inclined pivotally along one axis. Such a system cannot fully harness the separate energy factions in nature to maximum advantage, where the wind angle may not allow the solar collectors to operate efficiently by pointing them toward the sun at 90 degrees, and vice versa, where the ideal sun angle may not allow the sail function of the solar/wing to orient itself at the correct angle to the wind for good sail efficiency.
At this time designs for vessels powered by photovoltaic arrays alone have proven themselves to be incapable of continuous cruising speeds above 3 knots. The latest solar ship, the “Turanor
PlanetSolar,” is also the largest and most advanced, but even using sliding wing panel extensions and electronic (immovable) solar panel monitoring, this vessel could not better 3 knots average during a circumnavigation. Nor could the “Transatlantic Sun21” before it during a transatlantic crossing. The performance of such vessels is not attractive to commercial or military operators. The power to weight ratio of these vehicles is less than 1 kilowatt per ton. The design of the hull and electric motor propulsion system in relation to the energy collectors is therefore of paramount importance and needs to be addressed.
Vessels using the “Walker Wingsail” system as described in US Patent Numbers
US4467741 and US4856449 attributed to John G Walker, or Harbor Technologies Steerable Wing system as described in US Patent Number
US7461609 attributed to Mark T Ott et al, cannot provide truly autonomous navigation, because they harness
wind energy as physical force rather than electrical energy, so would need considerable additional energy collection devices onboard to provide energy for electrical instruments and other necessary operational equipment to be able to carry out surveying missions, requisite communications and as may be required, operation of weaponry. Additionally, when the wind dies down the vehicles so propelled have no means to store energy as a buffer for operation when becalmed.
Artificial intelligence requires a high level of autonomy, which must include the ability to engage with the environment locally optically, audibly and in the case of shipping, using sonar, radar, laser and infrared sensors.
Take for example a human; a human must be able to harvest energy from nature to be able to carry out his (his=his/her) mission. A human requires sensors to be able to interact with his environment and to be able to use gathered information to direct himself to carry out his mission – which may be nothing more than survival of the species.
Since this patent relates to waterborne vehicles, consider a dolphin. A dolphin uses energy derived from nature (fish), which it converts to propel itself, to be able to find more energy, detect and evade predators and find a mate to perpetuate the species. The mission of the
dolphin as an autonomous subject may differ from the missions of the present patent subject, but the concept is the same, to include magnetic sensing of the earth’s magnetic field for the purpose of navigation.
Logic dictates that for Intelligence to have developed in any organism, mobility is essential, and the two are interlinked. An immobile organism like a tree, for example, does not need to be intelligent, as we understand the meaning of intelligence, to exist. Combining mobility and energy collection from nature together, is a step forward in the evolution of man made artificial intelligence.
DISCLOSURE OF THE INVENTION
This/these present invention(s) or combination of inventions, overcome(s) the identified shortcomings of existing technology as follows:-
PATENT
CLAIMS: AUTONOMOUS VESSEL
ROBOT AI SYSTEM
THE
INVENTION(S) CLAIMED IS/ARE:
1. A navigable waterborne
vehicle embodying ...............................
By
way of an example of the above 'patent' technology in action, and in no
way limited to such dedicated or specific design, reference is made to a
proposed yacht
to incorporate the invention(s) optionally in any combination that may
thus be suitable for hydrographic,
oceanographic and military
operations, where the hull is SWASH
style with moveable, hence active outriggers in relation to a main central
submerged hull, the objective being to be able to trim the vessel as it
deploys energy harvesting equipment that is necessary to achieve energy
autonomy, as opposed to able to navigate
without a crew autonomously, which is also a feature of such a marine
robot.
The
basic design of this SWASH
vessel is to have wind
turbines located to the rear of the vessel and solar panel arrays
mounted high on a lightweight structure as shown, several meters above the
sea, with one fixed (central) panel and two moveable wings. The wind
turbines are placed to the rear on a boom that may be raised and lowered
according to weather conditions, to avoid shading the solar arrays for
most of the daily operation cycle and damage that may be caused by storms.
Likewise, the solar arrays track insolation and fold to avoid storm
damage, sensors providing information as to the vessels real time
environment. This example uses two large wind turbines to obtain high
cruising speeds. Other examples use smaller wind conversion machines with
many multiples, with lesser performance as a result.
This
vessel might easily be an ocean going tanker or cruise ship, where the
proportions of the active hull(s) and the size of the wind and solar
energy harvesting devices is smaller pro rata. Or where the ship is so
large that stabilizing outriggers may not be needed.
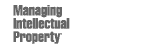
LEFT:
This diagram illustrates mid-range (partially) raised
turbines in a high beam wind, the vector causing roll to port (the vessel
is shown heading toward us). The
autonomous trimming system compensates for this running condition using
the active outriggers, by raising the starboard outrigger out of the sea
and lowering the port into the sea. The main hull of the vessel then
remains vertical, the deck horizontal. ABOVE RIGHT: A similar situation applies in this
depiction, except that the wind is faster, as in a storm and coming from
the port side. For this reason the turbine boom has been lowered to
reduce roll, while the port outrigger has been raised out of the sea to
take away buoyancy on that side, to
effect vertical running. By this means the ship can trim itself to harvest
as much energy from the wind as it is safe to do, while still maintaining
the best running speed in any given weather situation.
Here
is another example of the same vessel design heading directly into or away
from the wind, with the horizontal axis (vertical sweep bladed) turbines
at 90 degrees to the direction of travel ABOVE
LEFT & RIGHT: Here the conditions are such that the active hulls
must be in the sea to give a comfortable stable ride for any crew - or
simply to maximize on energy harvesting - especially from the solar panel
arrays.
The design of this vessel is © August 2014.
ABOVE
LEFT: In this picture, conditions are such that the yacht hull
is balanced so well that it does not need to have either the port or
starboard outriggers in the sea as stabilizers. This will reduce the
running drag of the vessel to the absolute minimum (as a mono-hull) -
unfortunately, not all of the time.
ABOVE RIGHT: Compare the wetted surface area of all three hulls in the
water, with the single hull on the left. To effect such running, requires
precision sensors and feedback, allied to dedicated trimming mechanics.
ABOVE
LEFT: The yacht shown above has mid-range (partially) raised
turbines in a high beam wind (they can go much higher), the vector causing
roll to port, where the vessel is shown heading towards us. In addition,
the solar arrays are tilted down on the starboard side and up on the port
side, which causes additional air drag, hence heeling to port. The
autonomous trimming system compensates for this running condition using
the active outriggers, by raising the starboard outrigger out of the sea
and lowering the port into the sea. The main hull of the vessel then
remains vertical and the yacht can continue to harvest more energy from
nature than it might had the outriggers not been moveable and designed to
compensate in this manner. The need for such mechanism is inherent in any
vessel designed to capture significant amounts of wind energy for
propulsion.
ABOVE
RIGHT: A similar situation applies in this depiction, except that the wind
is faster, as in a storm and coming from the port side, causing roll to
starboard. With the wind speed much higher, the turbine boom needed to be
lowered to reduce roll, while the port outrigger has been raised out of
the sea, to effect vertical running. By this means the yacht can trim
itself to harvest as much energy from the wind as it is safe to do, while
still maintaining comfortable conditions for a crew - or if unmanned,
simply to maintain a higher average mission speed. The design of this
vessel is © August 2014 and please note that the design features of this
yacht are post application and on their own do not reveal sufficient
information of the invention to make sense (be workable) unless read in
conjunction with Patent Specification GB2511731, the description and
claims therein.
BMS
LICENSING
We
are likely to be granting licenses in respect of this technology to
appropriate developers (associates/partners) for a nominal fee, with conditions. In
addition we are preparing improvement specifications for filing at a time
to suit stakeholders, such that world patent protection is obtained at a
time to coincide with new product launches. Contact
us in confidence to discuss strategy. MOD
- DEFENDING & COMMERCIALIZING IDEAS & INNOVATIONS
- June 23, 2014
Technology and information are at the heart of modern business, government and society. Here, Steven Murray, Senior Associate in the Defence, Security and The Forces team at leading law firm Harrison Clark Rickerbys, tells MOD DCB how companies can best protect their intellectual property.
With technology and information at the heart of society, businesses are increasingly aware of the value of their intellectual property (IP) and the importance of protecting it properly. Increasingly, ideas and innovations – IP, in fact – are used by their creators for competitive advantage by being licensed, rather than sold, so that their application is where commercial success is to be found.
It would be difficult to find a business that does not own and/or depend on IP. Businesses in the defence and security sector are no exception – indeed, they are often more dependent than most upon technology and technological innovation and, as a result of this, upon IP.
Knowing what IP assets a business has, and ensuring that it has taken appropriate steps to protect those assets, is the important first step in securing a business’s foundations. By way of a brief overview, the key IP rights are as follows. PATENTS Patents protect inventions (such as technologies and technological processes) that are new and involve an ‘inventive step’, ie that are not obvious to a reasonably skilled person in the relevant sector. Protection lasts for 20 years. While the process of obtaining a patent can take time, once granted a patent provides strong protection and a valuable business asset that can be licensed to others to generate revenue. REGISTERED
DESIGNS
Registered designs protect the appearance of the whole or part of a product. To be capable of registration a design must be novel and of individual character. Protection lasts a maximum of 25 years.
TRADE
MARKS Registered trade marks are distinctive signs or symbols used by traders to distinguish their products or services from those of other traders. Protection lasts for ten years initially and can be renewed (indefinitely) for subsequent periods of ten years.
The above are all ‘registered’ rights and registration brings with it the highest level of protection. Although not capable of registration, copyright (which protects creative materials, including computer programs) and rights in confidential information (which covers know-how and trade secrets), are important forms of protection enforced by the courts. Both are complex areas where specialist legal advice is very necessary.
Before entering into any collaboration, partnership or joint venture, it is very important to identify what IP rights each party owns and will be contributing, so that appropriate clauses can be incorporated protecting each party’s IP. Having identified its IP, a business should consider registering those assets where possible, both in the UK and abroad. Those assets are all part of a business’s valuable IP portfolio, and issues surrounding their ownership and protection can be very complex. Such agreements should be negotiated with care from the start, to prevent problems arising once a business has gone to market with its ideas.
Having identified its IP, and registered what it can, a business should then consider how such IP can be used and commercialised in order to drive business growth and generate revenue.
The defence and security sectors have an impressive history of commercialising their IP – the Malvern scientists who developed
radar could not have known that we would be using it to forecast the weather, and those who explored the potential of liquid crystals would be astonished to see LCDs in every home and business.
Many companies in every sector use registered trade marks to generate revenue as well as to protect their business – licensing a trade mark for use by another, complementary firm (as, for instance, when Starbucks and Apple joined forces to bring music to coffee houses) can be a lucrative and imaginative option.
It is of course not just registered trade marks that can be licensed to generate revenue. Patents protecting inventions, registered designs protecting the appearance of products, and copyright in creative materials such as software or graphics, can all be licensed to third parties for financial benefit.
For example, at Harrison Clark Rickerbys we act for an information security consultancy which has developed software that it licenses direct to end-users. We drafted the company’s licence and support agreements and advised it on protecting its brand and other valuable IP.
When contemplating any potential commercial arrangement under which IP will be licensed, there are numerous important issues to consider – and these will have to be carefully addressed in appropriate contractual documentation.
For instance: What is the scope of the IP licence, and precisely what IP rights are included? Is the licence to be exclusive, sole or non-exclusive? Can the licensee sublicense to others? Will a licence fee be payable, or a royalty of some kind, or both? What warranties is the licensor prepared to give? What will be the duration of the licence and in what circumstances would the licensor wish to be able to terminate it? What other restrictions, subject to consideration of applicable competition law, would the licensor like to include?
The length, content and language of any commercial contract should always be appropriate to the particular circumstances. There is no ‘one size fits all’ form of licence agreement or collaboration agreement that will work in any circumstance, just as no two business relationships are ever the same.
A good example of this is a clause dealing with ‘improvements’ to technology that are developed by one or other party – or even by the parties working together. Who should own such improvements is a matter for commercial negotiation, but it is very important to protect each party’s interests sufficiently to ensure that the right balance is created between freedom of use and control of the technology.
Restrictions and/or non-compete obligations should also be considered, bearing in mind competition law and restraint of trade limitations.
So, the benefits of finding commercial applications for valuable IP are obvious – the pitfalls are not always so clear, and legal advice throughout the process can leave a business free to focus on its markets, able to do what it does best. 
AUTONOMOUS
VESSEL: There are many ways artificial
intelligence (AI) can be used in traditional vessel designs, but for
real advances toward zero emission ocean transport, advanced navigation in
unmanned
vessels, should be allied to energy harvesting from nature.

ROLLS
ROYCE: Already have a developed system for unmanned cargo ships, but
their technology is not yet compliant with international regulations. Note
also the absence of energy harvesting devices on this artists impression,
though RR have done some work on wave
energy with grants from the TSB,
aiming to reduce fuel
costs. For which they should be applauded.
OTHER
TOPICS
. IP Reforms
. Patents Strategies
. IP Industry Challenges

The keys to succeed in
the IP Economy.
Research
& production
 and
and 
Knowledge
partners
 and and
Sponsors 
 
Partners
Media
CONTACTS

LINKS http://www.hcrlaw.com/ http://www.hcrlaw.com/ MOD
Contracts
Intellectual Property - defending and commercialising ideas http://www.contracts.mod.uk/intellectual-property-defending-and-commercialising-ideas-and-innovations/ http://www.cipo.ic.gc.ca/ http://www.ipaustralia.gov.au/ http://www.uspto.gov/ http://www.ipo.gov.uk/ http://www.ipsummit.info/ http://www.premiercercle.com/sites/ipsummit/2013/paris2013/ www.ipsummit.info https://twitter.com/IPSummit
Patent
office Australia Patent
office USA Patent
office UK Patent
office Canada
|