A boat, ship, or robot
vessel, that by virtue of a combination of the technology described
herein: computers, sensors, navigating equipment, terrestrial radio and
satellite communications, mechanical, electrical and hydraulic actuators,
photovoltaic arrays and wind generators/turbines and/or optionally,
multi-hull design, is capable of superior course keeping and of navigating
the high seas at speeds typically between 5 and 10 knots using only energy
harvested from nature and without the aid of a human captain, or any other
human sailors onboard the vessel, in a manner that such truly autonomous
vessel is able to calculate, plot and execute course keeping that utilises
energy for propulsion more efficiently, and where the autonomous
navigation system is compliant with the Collision at Sea Regulations ([COLREGS] as apply to all vessels) and other rules of the oceans and
harbours, as imposed by international agreements and treaties, and local
port authorities when entering ports/harbours, docking or leaving harbours
– utilising the onboard artificial intelligence thus created.
DIAGRAM
1. - CONCEPT ORIGINAL:
The very first autonomous vessel concept is coming of age. This large
scale (1:10) development model (or its immediate predecessor) was constructed
by the inventor and exhibited
at Earls
Court, Child Beale and other events
from 1995. The 'SolarNavigator' was a SWATH type twin hull 50' in length.
There was no mention of the (unmanned) technology at that time. The boat
was though powered by solar panels as the zero carbon harvesting power source. Note
the absence of wind
turbines. This vessel was designed to prove the theory that a solar
powered vessel could circumnavigate the globe on nothing but energy
harvested from nature as a means to halt climate
change. BMS has now negotiated the right to show this model at
commercial shows and conferences. Subject to notice, it could thus join
the 1:20 scale SWASH model (presently under construction) on 'Future' or 'Innovation'
stands from 2015. The SN model measures: 1675mm x 790 x 890mm (66" x
31" x 35" [LxWxH]) A rotating stand is available with lit
backboard. The Bluebird/Bluefish autonomous model(s) measure: 2300mm x
825mm x 735mm (90.5" x 32.5" x 29") with the turbines in a
mid position. The overall height varies according to turbine usage. Contact
BMS and ask Leslie for details.
PATENT DESCRIPTION: AUTONOMOUS VESSEL ROBOT AI SYSTEM
SUMMARY or OBJECT OF THE INVENTION
It is the object of the present invention to provide a truly autonomous platform for ocean going marine unmanned vehicles which platform addresses the limited performance of prior art unmanned surface vehicles proposed for: research exploration,
warfare, other persistent monitoring applications at sea and cargo or passenger vehicles. The platform is to provide extended endurance at practical speeds, 365 days a year and 24 hours a day operation or as required, programmed or reprogrammed en-route, taking advantage of the collision regulation compliant navigation system and artificial intelligence for superior navigation and course keeping.
BACKGROUND FIELD OF THE INVENTION
The present invention relates to manned robot assisted vehicles (RAVs) and unmanned, autonomous, waterborne vehicles for marine use, herein referred to as unmanned surface vehicles (USVs) or unmanned underwater vehicles (UUVs). In particular, although not exclusively, the invention relates to unmanned surface ocean vehicles utilising renewable energy, sourced in a manner which enables extended periods of operation at respectable velocity, for remote ocean surface and subsurface surveillance and survey, as may also be developed for, or applicable to cargo and passenger vessels, which requires a level of artificial intelligence.
DISCUSSION OF THE BACKGROUND ART
Ships, boats and other waterborne navigable vehicles frequently sink or run aground due to poor course or expedition planning and monitoring. In particular human error is to blame for many sinkings, such as the
Costa Concordia and
Baltic Ace tragedies in 2012, both of which were caused by human error.
The bridge of most modern ships and many larger yachts and fishing boats are well equipped with: radio, gps, sonar, radar, chart plotter, autopilot, weatherfax and the like, some of which is integrated, but still vehicles that are so well equipped fail to follow the best navigable course to their destination and worse, collide with other waterborne vehicles.
Even with so many electronic aids to navigation, captains of ships do not know where other ships are headed and cannot react to the discovery of a vessel on a collision course or the fact that an intended harbour destination may not have a berthing place for them, until discovery by radio lookouts, direct radio communications or radar contact. Such discovery is dependent on a
vessel's crew noticing electronic warnings or radio communications and taking/making the appropriate course correction, or speed reduction, to include giving appropriate signals according to the collision at sea regulations.
Commercial shipping in particular would benefit from a higher degree of automation aboard their vessels; such that the vessel itself might take the appropriate avoidance action, speed adjustment, or course correction autonomously for the safety of the vessel, should for any reason the human crew fail to respond. At the very least an artificially intelligent computer based system might give powerful visual and audible warning to any human crew, alerting them to any impending danger. Such a system may be optionally engaged by the human operators or owners. The problem being that no such system exists at this time where traditional navigation instruments/aids and engine controls are not designed for the purpose of autonomous running.
Military, governmental and commercial civilian uses for USVs in warfare, exploration, research and monitoring applications at sea are manifold. The ability of conventional platforms, such as boats, ships and buoys, to gather data and information in these applications is limited by the platform’s endurance, typically limited by diesel fuel capacity and/or battery capacity, particularly when compared to the vastness of the world's oceans. Ships are expensive to build, crew, fuel and operate. Buoys, free-floating or tethered, provide only local Ocean monitoring coverage. Oceanographic data may be gathered remotely by expensive earth orbiting satellites but the information gathered thereby is limited in definition and scope.
Sensors and instruments commercially available today to gather oceanographic and hydrographic data and information as deployed on conventional military and civilian scientific survey vessels and UUVs are well developed and capable. Modern radio and satellite communications and information technology may be used to fully exploit such onboard instruments and sensors, as described in U.S. Patent Number:
5,894,450, attributed to Schmidt et al. However, it will benefit such exploratory missions if the cost of such operations is reduced by incorporating said sensors and instruments onto a vehicle platform that is inexpensive to run by virtue of the ability to utilise free energy from nature effectively.
Conventional unmanned surface vehicles, such as that described in U.S. Patent Number:
5,713,293 attributed to Shiffler et al., or the Spartan "scout" vehicle proposed by the US Naval Undersea Warfare Centre of Newport, Rhode Island, USA, typically employ conventional fossil fuelled power units that limit range and endurance to the size of a vehicle’s onboard fuel tanks. Conventional unmanned surface vehicles and drones operating in a semi-autonomous mode are also subject to the threat posed by collision or close encounters with larger vessels and cannot provide other vessels they encounter with the correct international collision warning signals as prescribed by the Merchant Shipping (Distress Signals and Prevention of Collisions) Regulations
1996, bringing into force the Convention on the International Regulations for Preventing Collisions at Sea
(1972), as amended by the International Maritime Organisation with Resolution A.910(22), the latest amendments coming into force internationally in November 2003.
The use of solar energy to supplement conventional energy sources, such as fossil fuels or wind energy, for marine vessels has been demonstrated by International Patent Publication Numbers: WO 98/21089 and
WO2005/012079 attributed to
Robert Dane et al, which describes rigid wings that are used as sails incorporating on their foil surfaces photovoltaic solar panel arrays. This/these system(s) though is/are constrained as to effectiveness by incorporating the wind and solar energy collector elements as one in a solar/wing inclined pivotally along one axis. Such a system cannot fully harness the separate energy factions in nature to maximum advantage, where the wind angle may not allow the solar collectors to operate efficiently by pointing them toward the sun at 90 degrees, and vice versa, where the ideal sun angle may not allow the sail function of the solar/wing to orient itself at the correct angle to the wind for good sail efficiency.
At this time designs for vessels powered by photovoltaic arrays alone have proven themselves to be incapable of continuous cruising speeds above 3 knots. The latest solar ship, the “Turanor
PlanetSolar,” is also the largest and most advanced, but even using sliding wing panel extensions and electronic (immovable) solar panel monitoring, this vessel could not better 3 knots average during a circumnavigation. Nor could the “Transatlantic Sun21” before it during a transatlantic crossing. The performance of such vessels is not attractive to commercial or military operators. The power to weight ratio of these vehicles is less than 1 kilowatt per ton. The design of the hull and electric motor propulsion system in relation to the energy collectors is therefore of paramount importance and needs to be addressed.
Vessels using the “Walker Wingsail” system as described in US Patent Numbers
US4467741 and US4856449 attributed to John G Walker, or Harbor Technologies Steerable Wing system as described in US Patent Number
US7461609 attributed to Mark T Ott et al, cannot provide truly autonomous navigation, because they harness
wind energy as physical force rather than electrical energy, so would need considerable additional energy collection devices onboard to provide energy for electrical instruments and other necessary operational equipment to be able to carry out surveying missions, requisite communications and as may be required, operation of weaponry. Additionally, when the wind dies down the vehicles so propelled have no means to store energy as a buffer for operation when becalmed.
Artificial intelligence requires a high level of autonomy, which must include the ability to engage with the environment locally optically, audibly and in the case of shipping, using sonar, radar, laser and infrared sensors.
Take for example a human; a human must be able to harvest energy from nature to be able to carry out his (his=his/her) mission. A human requires sensors to be able to interact with his environment and to be able to use gathered information to direct himself to carry out his mission – which may be nothing more than survival of the species.
Since this patent relates to waterborne vehicles, consider a dolphin. A dolphin uses energy derived from nature (fish), which it converts to propel itself, to be able to find more energy, detect and evade predators and find a mate to perpetuate the species. The mission of the
dolphin as an autonomous subject may differ from the missions of the present patent subject, but the concept is the same, to include magnetic sensing of the earth’s magnetic field for the purpose of navigation.
Logic dictates that for Intelligence to have developed in any organism, mobility is essential, and the two are interlinked. An immobile organism like a tree, for example, does not need to be intelligent, as we understand the meaning of intelligence, to exist. Combining mobility and energy collection from nature together, is a step forward in the evolution of man made artificial intelligence.
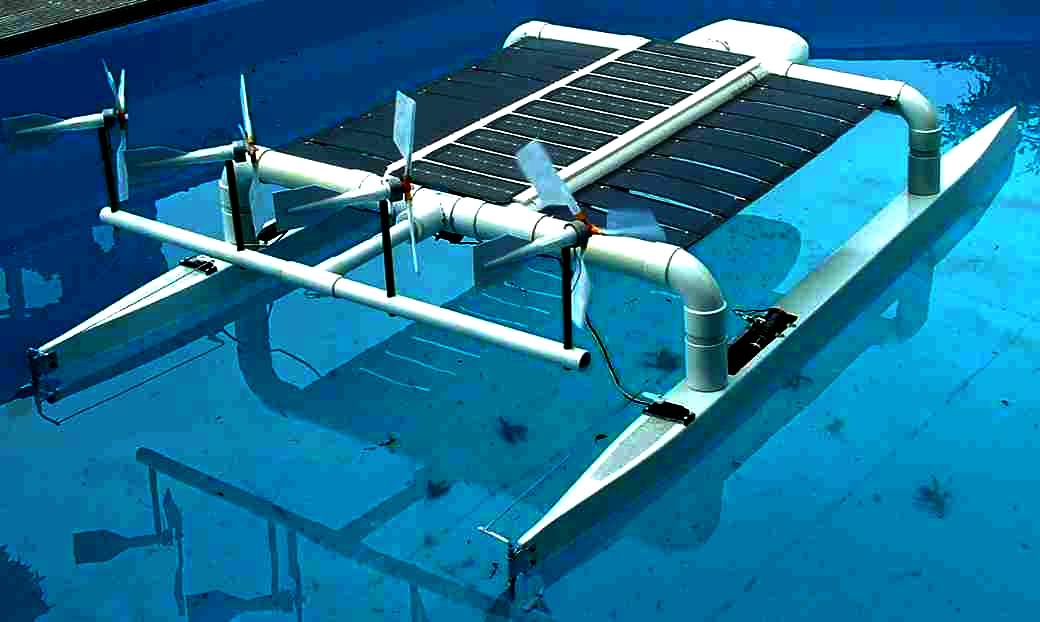
DIAGRAM
2. - DEVELOPMENT 7 YEARS ON:
Another in the series of autonomous vessel concepts as a 1:20th scale model
from 2003. This 'SolarNavigator' was a conventional catamaran twin hull.
Again, there was no mention of the (unmanned) technology at that time, but
a patent was filed in 2000 and withdrawn as being too far advanced
(radical) for the then market. The boat
was powered by solar panels, now with wind turbine energy harvesting
added, but not being adjustable - such as to track ambient energy sources.
DISCLOSURE OF THE INVENTION
This/these present invention(s) or combination of inventions, overcome(s) the identified shortcomings of existing technology as follows:-
HULL - 1.
To overcome the problems identified, the hull of a vessel, especially an
autonomous vessel is arranged as two or three hulls, with the main hull
running below the surface waves to reduce wave drag and enjoy relatively
undisturbed linear water flow as skin friction in submarine fashion, in
combination with one or two additional hulls moveable in relation to the
main hull transversely and placed a distance from the main buoyancy hull,
to be able to effect angular and displacement changes to be able to
compensate for sea state, winds, and other factors, as dictated by
electronic feedback from onboard sensors that calculate overall vehicle
drag and make adjustments to the running trim, actively, to keep the
vehicle at the ideal velocity, after consideration of the available stored
energy and the incoming energy from the collectors as described elsewhere
in this patent specification, also comparing such information with the
mission parameters that the vehicle has been programmed to carry out.
The main hull is connected to the superstructure by a foil or foils, fore
and aft, to provide superior control of pitching in any seaway.
In addition to the above, the design of the hull is such that solar panel
collector arrays may be mounted high above the waves on lightweight
frames, such frames optionally forming part of the superstructure, so too
any wind generating turbines. The submerged main hull and outrigger
provision, provides a high degree of stability both in pitch and roll,
which is essential for some survey monitoring functions, so too the task
of keeping solar panel arrays aimed at the sun, and to thereby minimise
the energy that may be required to be expended for the purpose of
directing the PV arrays at the sun as the sun rises in the east and sets
in the west, taking into account any changes in course from north to
south, west to east (and vice versa) and any combination of [compass]
course
headings, such as south, south-west, north, north-east and so on.
ENERGY - 2.
Energy is to be collected from nature using solar panel arrays that may
track the sun along one or two hinged, or pivotal axes. Care should be
taken in the design to ensure that the mechanical complications of a dual
axis tracking system does not add to the mass of the arrays such, that the
vehicle will become unrealistically heavy, such additional mass increasing
hull drag, thereby negating any advantage from sun tracking. The tracking
is to be electronically and/or digitally controlled by comparator sensors
and computer program, as part of the vehicle’s onboard energy management
system.
Complimenting the photovoltaic panel collectors, it is necessary to
include an array of wind generators, comprised of one or more turbine
electricity generators mounted on the hull or superstructure in such a
manner as not to obscure the solar panel arrays. In addition and by means
of enhancing the energy collected from the prevailing wind, it is desirous
to be able to position the wind generators to best collect energy and at
times, when the weather poses a potential risk of damage to the wind
generators, to be able to move and/or fold, or lock the generators away,
such as to present less of a frontal area for a high wind such as a
hurricane to bite on.
ONBOARD ARTIFICIAL INTELLIGENCE - 3.
The electrical energy collected by the above means is managed by an
onboard computer, which monitors charge of the vehicle’s batteries, so
to store sufficient energy for periods when the sun is not shining and the
wind is not blowing, but also compares and calculates the energy that is
required for the longer term mission and either reduces consumption, or
allows an increase in the consumption of energy, to the best advantage of
the vehicle in terms of journey speed and voyage planning. Put into human
terms, using this onboard management system the vehicle knows when it is
hungry or about to go hungry, or when it is fat and can afford to expend
energy.
The onboard computer(s) collect information from the vehicle’s
navigation instruments: optical, audible, wind speed and direction, and
other environmental sensors and satellite or other radio communications
(data) and applies a logical solution to the situation in real time, to be
able to carry out the vehicle’s navigational or survey mission
(journey), safely, with especial regard to collision avoidance.
Information that is gathered by the Onboard Artificial Intelligence (OAI)
is shared between shore based databases and other vehicles that are able
to communicate while navigating a course. In human terms this information
sharing increases the chances that other people will pilot their vessels
safely, and also allows governments who elect to share such information,
to plan for the inevitable increase in marine traffic in coming years.
Especially for the safe operation of certain congested sea routes, such as
the English Channel (Dover straits – the world’s first traffic
separation scheme), Baltic region and North Atlantic, by way of limited
example, with reference to the SOLAS Convention of 1960 and the
International Maritime Organization’s function.
Where the present invention applies to pre-existing vehicles wishing to
utilise the artificial onboard intelligence to manage navigation, it is
desirable to engineer the OAI system for backward integration utilising
legacy navigation instrumentation as may be present on existing boats and
ships, to be supplemented where necessary with diesel and steam turbine
engine management add-ons by way of accessory sensors and controls,
retro-connectable to the OAI via a compatible breakout box from the OAI.
Secondary to good navigational course management, the Onboard Artificial
Intelligence of this present invention uses data collected to adjust the
hull trimming of the vehicle, and running speed to be able to travel as
quickly as possible between navigations waypoints, provided that speed is
a desirable mission requirement.
It should be understood that the above embodiments are provided only by
way of example as to application and that further modifications and/or
improvements thereto, as would be apparent to persons skilled in the
relevant art, are deemed to fall within the broad scope and ambit of the
present invention defined in the claims which follow:-
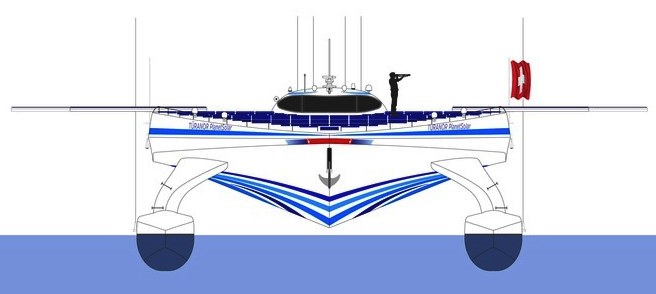
DIAGRAM
3. - On the 4th of May 2012, the 'Turanor PlanetSolar' (shown above)
proved the theory proposed (and presented) by the inventor in 1995 at the
Earls Court Boat Show, that a circumnavigation
of the globe was possible on energy harvested from the sun alone. This
milestone could lead to robotic ocean cleaners for the plastic
presently choking sea life and poisoning our food chain.
PATENT
CLAIMS:AUTONOMOUS VESSEL
ROBOT AI SYSTEM
THE
INVENTION(S) CLAIMED IS/ARE:
1. A navigable waterborne vehicle embodying an electric traction motor or
motors and/or batteries, for propulsion via propeller(s), including
turbine propeller(s) or impeller(s), incorporating the Claims below in any
order or combination save for those Claims relating to vehicles utilising
internal combustion, gas turbine or steam turbine propulsion.
SOLAR and WIND ENERGY HARVESTING
2. A vessel capable of virtually continuous operation (long endurance) at
sea using only energy collected from nature, namely: incoming solar
radiation, via photovoltaic arrays to generate electricity and wind energy
via wind generators (wind turbines) to generate electricity separately
where weather conditions dictate prudence, and more generally in
combination to increase the energy collected by way of kilowatts per hour
per ton of vessel to a level, (typically 3 to 6 Kw/hrs per ton averaged
over 168 hours a week and 52 weeks of the year) where ocean passages may
be traversed at speeds equivalent to that of conventional ocean going sail
propelled vessels and internal combustion motorised vessels, typically
between 6 to 10 knots velocity continuously over 168 hours a week average
and 52 weeks of the year.
2a A vessel as claimed in Claim 2.whereby the energy collection average(s)
in terms of sunshine hours is/are dependent on the geographical location
on the earth’s surface in terms of latitude and longitude, where a
vessel’s latitude position dictates the hours of, and intensity of the
likely seasonal incoming solar radiation. Thus if a vessel is intended to
operate mostly near the equator, a higher performance may be expected for
a mainly solar powered vessel, which should be designed for more solar
panel area, as opposed to a vessel that is operated mostly in the Arctic
or Antarctic regions, where reliance would be mainly on the wind turbine
element of the energy harvesting apparatus, thus should be designed to
carry more wind energy harvesting apparatus in proportion to solar energy
harvesting apparatus.
3. A vessel as claimed in Claims 2 and 2a whereby the energy harnessed
from nature utilises active and passive electronic energy management
systems, to enhance the energy percentage collected by those means to
between 3 and 7 kilowatts per ton of vessel, taking into account
geographical orientation of the vessel and weather conditions and so as to
increase the performance of a/the vessel from any given physical size of
photovoltaic array and/or rotary wind generators.
SOLAR ENERGY HARVESTING
4. A vessel as claimed in Claim 3 whereby the energy management system(s)
physically move solar arrays and/or wind turbine arrays in combination, or
concert, using mechanical, electrical and/or hydraulic actuators to
advantage those arrays of the most efficient angle for collection of
energy from nature, by keeping solar arrays aimed at ninety degrees to the
sun without shading, or as close as possible to that ninety degree ideal,
by way of electronic (solar) tracking, and by keeping wind generators
raised as high as possible into the faster moving prevailing air-streams,
by way of electronic wind (air stream velocity) tracking, while still
maintaining a stable operational attitude for the vessel that is
harvesting the energy from nature, utilising physical means to achieve
such hull stability (via trimming) as described in any following claim.
4a A vessel as claimed in any claim herein, whereby the solar arrays of
the autonomous vessel are divided into lightweight wings mounted above the
water on a lightweight structure, so that they move independently of each
other, but track the sun, without casting shadow onto a partner wing and
work in conjunction with a wind turbine generator tracking system to
prevent shading of the solar arrays.
4b A vessel as claimed in any claim herein, whereby the solar array(s) of
the autonomous vessel may be aimed directly at the sun along one
collection axis in relation to the vessel’s hull, divided into a number
of smaller arrays for the purpose of containable control, (or otherwise as
practical along that axis to avoid constant searching) while the wind
turbines are aligning themselves along a different axis in relation to the
vessel’s hull, to aim the blades variably into the wind, which may be,
and is invariably, coming from a different direction to the direction of
the sun’s rays, and where both sources of energy from nature are
invariably at a different angle in relation to the heading or course of a
vessel, such an arrangement thus providing dual axis energy harvesting
with independent tracking for each axis, the object of such dual axis
flexibility to be able to compensate for the course of a vessel in
relation to prevailing wind vector(s) and incoming solar radiation.
WIND ENERGY HARVESTING
4c A vessel as claimed in any claim herein whereby the wind turbines,
singly or as an array of two or more banks of turbines, are not fixed
rigidly to the hull of a ship at a fixed height so as to be only rotatable
to face into the wind to ensure the correct angle of attack for the
harvesting blades, but additionally may be raised and lowered on a boom
that is operated mechanically, electrically and/or hydraulically to lift
that/those wind turbine(s) high(er) up into the air-stream, by 10 or more
meters on a 50 meter vessel, or in proportion to vessel size by a
significant percentage (on larger ships), to gain more energy from the
faster moving higher altitude air, and then lower the wind generators
using the same boom, to effect furling, when the weather is unfavourable
by virtue of hurricanes, storms or other seasonally (high) irregular
wind-speeds, that may prohibit the safe collection of energy from nature
by this means.
4d A vessel as claimed in any claim herein, whereby the wind turbine
array(s) is/are not only monitored by an airspeed tracking system as a
stand alone control circuit, but where that system works in conjunction
with solar panel trackers to prevent the wind harvesting apparatus from
shading the solar harvesting arrays, sharing information of output
electronically and/or in conjunction with computer programs and onboard
navigation equipment to maximise energy harvesting.
4e A vessel as claimed in any claim herein, whereby the wind harvesting
arrays may be folded horizontal to the sea’s surface and braked to
prevent rotation, rather than kept vertical as when they are operational
and spinning; this safeguard being for the purpose of preventing turbine
damage and to reduce the area of the vessel as presented to a high wind or
high seas in storm conditions, by way of rigging the vessel to survive
tropical revolving storms and/or hurricanes.
RECONFIGURABLE MULTIHULL OR ACTIVE HULL
5. A vessel as claimed in any Claim herein with a hull form comprised of a
central semi-submerged, or submerged main buoyancy hull, in combination
with a stabilising transverse outrigger or stabilising transverse
outriggers that are actively adjustable in relation to the angle or height
of the main hull (or raised decking) for the purpose of trimming the hull
to effect horizontal (longitudinal and transverse) stability in any sea
condition as compared to the ocean surface, and also to effect minimum (or
to minimise) operational hydrodynamic drag and surface hydraulic hull
pressures (pressure wave signatures), to increase transit speed, such that
oceanographic/hydrographic ocean surveying and/or object hunting/searching
is enhanced and improved.
6. A vessel as claimed in Claim 5 where the active outriggers may be
raised, or lowered and/or flooded to effectively lower the main hull down
into the ocean to achieve a smaller visible area of superstructure as
presented to a high wind and to achieve a storm anchor effect from the
increased water drag, and by this means a storm safe operational mode may
thus be achieved for the vessel, as desired, even where this/such mode of
operation may reduce transit speed.
6a A vessel as claimed in Claims 5 and 6 where the solar energy harvesting
panels may be lowered (folded down) to deflect high winds in storm
conditions, and so as to fair-in the reduced superstructure area, such as
to reduce any damage that may otherwise have occurred if the hatches, as
it were, were not battened down, or the vessel otherwise not been capable
of rigging for tropical revolving storms or hurricane winds.
ROBOTIC FUNCTION
7. A boat, ship or vessel as in any Claim herein that by virtue of a
combination of electronic control and feedback devices such as electrical
and electronic digital programmable chips, sensors, radio equipment, gps,
computers, programs and communication devices, is in effect a low level
(sea or sub-sea level) satellite or autonomous craft, that may interface
with its surroundings at a high level in robotic fashion to be able to
execute navigational mission commands, all the while reacting to changing
(real time) circumstances in relation to its low level journeys around the
earth, such as to be able to dispense with human control for practical
long range, unmanned or continuous endurance navigation at sea as may
benefit cargo ships, liquid carrying ocean going tankers, cruise liners,
ferries, oceanographic and
hydrographic survey vessels,
warships,
submarines,
minesweepers and other military
vessels that are required to
carry out patrols that are of a duration described as persistent in
relation to homeland security and counter terrorism purposes.
8. A robotic, autonomous vessel substantially as described in any Claim
herein, controlled by electronic onboard equipment and mechanical
actuators, with digital electronic computer programming (hard chip or
software) to imbue a high level of artificial intelligence (AI), for the
purpose of long-term interactive (spatial and other real time awareness)
decision making, operational course planning and short-term or real-time
interaction such that the vessel functions are managed to provide the best
logical navigation performance for any given mission, taking into account
natural conditions, such as weather, sea state, tides, and the planet’s
orbit, so to be able to supplement, replicate or replace the best human
operators and captains for unmanned operation.
9. An onboard artificially intelligent (OAI) vessel management and
navigation system as claimed in any Claim herein whereby the autonomous
vessel so equipped is able to make decisions for itself, affecting the
navigation of the vessel such as to be able to comply with the Merchant
Shipping (Distress Signals and Prevention of Collisions) Regulations 1996
as amended or as may be amended in the future via updates, to include
compliance with other international and local maritime rules of the sea.
10. An onboard artificially intelligent vessel management and navigation
system as claimed in any Claim herein, that is in addition to the ability
of an autonomous vessel to navigate from point A to point B on the globe
unmanned, is by virtue of long and short range sensing equipment
(typically optical cameras, radar,
laser and lidar), able to build up a
real time picture of the operating environment with sufficient precision,
to detect other vessels under power (or objects, or persons adrift) on the
ocean surface such as to calculate the other vessels (or objects)
trajectory to be able to plot a course to take the appropriate avoidance
action in compliance with COLREGs as may be amended, or simply to avoid
colliding with another vessel or life-form to prevent accidents or loss of
life.
11. An onboard artificially intelligent vessel management and navigation
system as claimed in any Claim herein, that is in addition to the ability
of an autonomous vessel to navigate from point A to point B on the globe
unmanned, is by virtue of long and short range sensing equipment (sonar
and other acoustic instruments), able to build up a picture of the
subsurface operating environment in real time with sufficient precision,
to detect other vessels under power and large marine organisms, below the
ocean surface such as to calculate the other vessels (or marine organisms)
trajectory to be able to plot a course to take the appropriate avoidance
action in compliance with COLREGs as may be amended, or simply to avoid
collision and accidental damage or loss of life.
12. An onboard artificially intelligent vessel management and navigation
system as claimed in any Claim herein, that is in addition to the ability
of an autonomous vessel to navigate from point A to point B on the globe
unmanned, is by virtue of onboard long and short range sensing equipment,
able to build up a picture of the environment in real time with sufficient
precision, to detect land masses and approaching shores, ship wrecks,
coral reefs, rocky outcrops and other geographical irregularities such as
to be able to take avoidance action to prevent accidental collision in the
interests of self preservation and to avoid the loss of human life.
13. An onboard artificially intelligent vessel management and navigation
system as claimed in any Claim herein, that is capable on identifying
human life-forms in seawater using heat and other (motion) sensors, such
that if there is a human life that is clearly not situated in a vessel
such that that person might be danger of losing his or her life, that the
intelligent vessel so equipped might take appropriate measures to render
assistance to effect a rescue, in compliance with COLREGs as may be
amended, or simply in the interests of preserving human life. Once a
potentially life threatening situation has been identified, this function
includes the sending of distress signals to third party rescue services
where medical attention may be needed, and the dispensing of life
preserving equipment automatically.
14 An onboard artificially intelligent vessel management system as claimed
in any Claim herein whereby proprietary ship identification, navigation
and communication equipment that is known commercially as AIS (Automatic
Identification System) is used with or without the COLREGs compliant
ship-borne detection system in any preceding claim(s) to track other
vessels at sea for the purpose of taking the prescribed avoidance action,
and to share waypoint information with other terrestrial navigation or
water traffic controls/controllers, of impending or potential collision,
or of a near miss, to be in a better position to avoid such incident(s)
and also to pre-warn local port or coastguard authorities and other
vessels of any developing situation(s).
15 An onboard artificially intelligent vessel management system as claimed
in any Claim herein whereby once a potential collision has been averted,
and/or a life saving rescue has been effected, the autonomous vessel so
equipped then resumes its original course objectives, recalculating as
necessary to navigate to the next destination waypoint.
16 An onboard artificially intelligent vessel management system as claimed
in any Claim herein whereby a potential or developing collision situation
is reported live in real time (by way of an urgent and instant alert) to
the vessels operators at a/their terrestrial base of operations (or bases
or operations) via radio and/or satellite or other intermediary
communications for the purpose of allowing the operators/owners to take
control of the vessel remotely in drone fashion, at any time and near
instantly, such as to enhance collision avoidance and immediately return
the vessel to a pseudo or virtual manned condition.
17 An onboard artificially intelligent vessel management system as claimed
in any Claim herein, whereby the autonomous vessel is equipped with
COLREGs compliant lighting equipment, audio loudspeakers, radio
communication, and radar reflector equipment such as to be able to give
the appropriate (physical) warning signals and other communications to
approaching ships or vessels, where it is deemed by the Onboard
Artificially Intelligent management system may in the near future threaten
the safety of the vessel by virtue of a potential collision course
trajectory, such as to meet with the obligations imposed by the collision
avoidance Regulations and exceed the performance of a/an equivalent human
operator, provided that if reacting faster to emergency situations than a
human operator might, that human operators on other manned vessels as sea
might cope with such speed of warning signals, whereupon such signals
might be repeated at slower speeds to ensure that a competent crew might
take notice.
ACTIVE HULL HYDRODYNAMIC EFFICIENCY
18 A robot ship or autonomous vessel as claimed in any Claim herein which
may make real time mechanical adjustments to an active hull for the
purpose of increasing the efficient running of the vessel, or for the
purpose of weathering storms, deploying stormanchors, and battening down
any operational surfaces and equipment.
19 A robot ship or autonomous vessel as claimed in any Claim herein where
an active hull comprises of a single main hull, and one or more outriggers
that are movable in relation to the main hull such as to raise or lower
the outriggers independently of each other to reduce or increase the
submerged volume of the outriggers and in doing so raising or lowering the
main hull running depth in the water to take up the increase or decrease
of the running height of the vessel in relation to wave height.
SWATH
20 A robot(ic) ship or autonomous vessel and claimed in any Claim herein,
whereby an active hull comprises not of moveable outriggers, but of twin
parallel submerged hulls that may effect trimming adjustments by flooding
or blowing compartments to be able to maintain a horizontal attitude even
where poorly loaded, or where solar tracking involves raising and lowering
of wing mounted PV arrays and boom mounted wind generators against
prevailing airflow, that has the effect of causing a heeling moment, that
in turn disturbs the efficient energy harvesting operation of the said
onboard solar and wind generator arrays.
MARINE TRAFFIC and HARBOUR DOCKING
21 A robot vessel or autonomous ship as claimed in any Claim herein
utilising indirect satellite or direct radio information exchanges with a
shore based monitor, port authority, or other vessel management central
monitoring and/or data collection bank, for the purpose of managing marine
traffic at sea and in harbours and ports, and in the case of an autonomous
vessel, especially as may be required during the execution of long
endurance unmanned missions for mission monitoring and other performance
related purposes.
22 A vehicle/vessel substantially as claimed in any Claim herein whereby
the robotic/autonomous control(s) may be overridden temporarily or more
permanently for remote control or drone navigation or for changing other
mission objectives, while still retaining any combination of robotic or
autonomous functions that may assist a shore based human
commander/captain/pilot effect remote, or drone, control.
23 A vehicle/vessel substantially as claimed in any Claim herein whereby
the drone, or remote control function may be shared between the owners or
operators of the vehicle and a/any port authority for the purpose of
docking, loading and unloading of a vessel while unmanned, and berthing
queue control.
24 A vessel as claimed in any Claim herein, combining the claimed elements
in a manner such as to collect and disseminate information as digital data
to a land base or bases and/or other vehicles on land, air or sea, such as
to provide persistent and up to date information for strategic planning
and superior course, and marine traffic management (Marine Traffic
Control), especially concerning the many congested green ocean passages
and harbour/port traffic.
25 A vehicle substantially as claimed in any Claim herein whereby
information gathering by the vehicle is disseminated, working in
conjunction with other similarly equipped vessels so to provide networked
fleet surveys and other maritime information gathering and dissemination
for the purpose of rapidly updating admiralty and other international
charts, or for rapid military or oil exploration surveys, or persistent
monitoring of trouble ocean areas, also being cost effective in autonomous
mode where energy from nature reduces fuel costs and wages for crews is
eliminated, save for shore based monitoring.
26 A vessel substantially as claimed in any Claim herein which is
propelled by means other than electric traction motors and batteries, such
as diesel engines and/or gas and steam turbines, so not incorporating
energy from nature, but still wishing to utilise the internationally
compliant port authority, or collision regulation compliant (COLREGs)
artificially intelligent navigation system (OAI).
27 A vessel substantially as claimed in any Claim herein where the onboard
COLREGs compliant OAI navigation and early warning system may be installed
on conventional manned vessels as an aid to marine safety at sea at the
design and build stages of construction of new builds.
28 A vessel substantially as claimed in any Claim herein whereby the
vessel is an older boat, ship or yacht where the owner(s) wish(es) to
retro fit the Onboard Artificial Intelligence element of this present
invention using legacy navigation equipment, to upgrade the existing
navigation equipment such as to be able to comply with COLREGs as an
additional safety feature to manned operation, which may be accomplished
by way of the provision of an accessory, or aftermarket kit to include the
OAI which connects to the vessel’s existing navigation equipment (bridge
or helm) by way of backward compatible break out boxes, or other
compatible electronic interface(s).
29 A vessel substantially as claimed in any Claim herein whereby the
vessel is an older boat, ship or yacht where the owner(s) wish(es) to
retro fit the Onboard Artificial Intelligence element of this present
invention such as to advantage said (older) vessel of COLREGs compliant
navigation, and where the engines of that older vessel do not have
suitable engine controls, but may connect to the OAI via a compatible
electronic kit supplied as an accessory.
30 A vessel substantially as claimed in any Claim herein that is propelled
by diesel engines, or gas or steam turbines coupled to generators, which
generators are in turn coupled to electric traction motors with or without
batteries as an energy store, or buffer, to form a hybrid propulsion
system.
31 A vessel substantially as claimed in any Claim herein that is propelled
by dual fuel engines, diesel and/or liquid natural gas, with the object of
reducing airborne pollution, which vessel operates in unmanned or drone
mode, to include a/the COLREGs compliant navigation system.
32 A vessel as claimed in any previous claim where a conventionally
propelled vessel, using reciprocation internal combustion engines, steam
or gas turbines, incorporates a/the dual axis solar and wind energy
harvesting system as a means to reducing fossil fuel consumption, and/or
pollution from combustion engines.
DIAGRAM
4. - DEVELOPMENT 18 YEARS ON: The latest test hull (Bluebird/Bluefish)
to see the light
of day is to be built firstly as an active SWASH hulled yacht with crew
accommodation, and secondly as a military development, or utility platform
where cruise missiles
and torpedoes
replace fore and aft cabins, or where mine
disposal equipment is the payload . (The autonomous aspect of the design previously
kept secret is now published - for better or worse.) The picture above
shows a boat with aluminium hulls and a space-frame superstructure, where
the alloy tubing is laid in a jig, before being welded to other tubing to
form a complete frame.
DIAGRAM
5. - By
way of an example of the above 'patent' technology in action, and in no
way limited to such dedicated or specific design, reference is made to a
proposed yacht
to incorporate the invention(s) optionally in any combination that may
thus be suitable for hydrographic,
oceanographic and military
operations, where the hull is SWASH
style with moveable, hence active outriggers in relation to a main central
submerged hull, the objective being to be able to trim the vessel as it
deploys energy harvesting equipment that is necessary to achieve energy
autonomy, as opposed to be able to navigate
without a crew autonomously, which is also a feature of such a marine
robot.
The
basic design of this particular SWASH
vessel is to have wind
turbines located to the rear (or front, or front and rear) of the vessel and solar panel arrays
mounted high on a lightweight structure as shown (above), several meters above the
sea, with one fixed (central) panel and two moveable wings. The wind
turbines are placed to the rear on a boom that may be raised and lowered
according to weather conditions, to avoid shading the solar arrays for
most of the daily operation cycle and to avoid damage that may be caused by storms.
Likewise, the solar arrays track insolation and fold to avoid storm
damage, sensors providing information as to the vessels real time
environment. This example uses two large wind turbines to obtain high
cruising speeds. Other examples use smaller wind conversion machines with
many multiples, with lesser performance as a result.
This
vessel might easily be an ocean going tanker or
cruise ship, where the
proportions of the active hull(s) and the size of the wind and solar
energy harvesting devices is smaller pro rata. Or where the ship is so
large that active stabilizing outriggers may not be needed.
LEFT:
This diagram illustrates mid-range (partially) raised
turbines in a high beam wind, the vector causing roll to port (the vessel
is shown heading toward us). The
autonomous trimming system compensates for this running condition using
the active outriggers, by raising the starboard outrigger out of the sea
and lowering the port into the sea. The main hull of the vessel then
remains vertical, the deck horizontal. ABOVE RIGHT: A similar situation applies in this
depiction, except that the wind is faster, as in a storm and coming from
the port side. For this reason the turbine boom has been lowered to
reduce roll, while the port outrigger has been raised out of the sea to
take away buoyancy on that side, to
effect vertical running. By this means the ship can trim itself to harvest
as much energy from the wind as it is safe to do, while still maintaining
the best running speed in any given weather situation.
DIAGRAM
7. - ABOVE
LEFT: In this picture, conditions are such that the yacht hull
is balanced so well that it does not need to have either the port or
starboard outriggers in the sea as stabilizers. This will reduce the
running drag of the vessel to the absolute minimum (as a mono-hull) -
unfortunately, not all of the time.
ABOVE RIGHT: Compare the wetted surface area of all three hulls in the
water, with the single hull on the left. To effect such running, requires
precision sensors and feedback, allied to dedicated trimming mechanics.
DIAGRAM
8. - ABOVE
LEFT: The yacht shown above has mid-range (partially) raised
turbines in a high beam wind (they can go much higher), the vector causing
roll to port, where the vessel is shown heading towards us. In addition,
the solar arrays are tilted down on the starboard side and up on the port
side, which causes additional air drag, hence heeling to port. The
autonomous trimming system compensates for this running condition using
the active outriggers, by raising the starboard outrigger out of the sea
and lowering the port into the sea. The main hull of the vessel then
remains vertical and the yacht can continue to harvest more energy from
nature than it might had the outriggers not been moveable and designed to
compensate in this manner. The need for such mechanism is inherent in any
vessel designed to capture significant amounts of wind energy for
propulsion.
An
autonomous boat, ship, or robot vessel that is driven using at
least one electric traction motor that drives propeller(s).
The motors are powered using batteries that are charged using
renewable energy in the form of solar radiation and wind
energy. Solar radiation is collected using photovoltaic arrays
and the wind energy is collected using wind turbines. The
vessel may use computers, sensors, navigating equipment,
terrestrial radio and satellite communications, mechanical,
electrical and hydraulic actuators and/or multi-hull design
for superior course keeping and for navigating the high seas
at speeds typically between 5 and 10 knots. The vessel only
uses energy harvested from nature and is entirely autonomous,
able to calculate, plot and execute course keeping that
utilises energy for propulsion more efficiently, and in such a
manner that it is compliant with the Collision at Sea
Regulations.
BMS
have acquired the rights to this patent applied for technology. We
are likely to be granting licenses in respect of the above innovations to
appropriate developers (associates/partners) for a nominal fee, with conditions. In
addition we are preparing improvement specifications for filing at a time
to suit stakeholders, such that world patent protection is obtained at a
time to coincide with new product launches. Contact
us in confidence to discuss your needs and strategy.
An
active hull comes with a whole lot of advantages over a rigid
hull. STEALTH MODE: wings lowered, hull partially flooded. Radar
does not like (bounces off) angled surfaces - turbines folded.
STORM
MODE: hull flooded, wings folded and outriggers raised. Submerged
main hull now acts as a storm anchor.
DIAGRAM
9. - An active hull can robotically rig for storm
conditions or stealth running, to avoid radar detection, the main
objective being to keep the machine as safe as possible at all times.
MOD
- DEFENDING & COMMERCIALIZING IDEAS & INNOVATIONS
- June 23, 2014
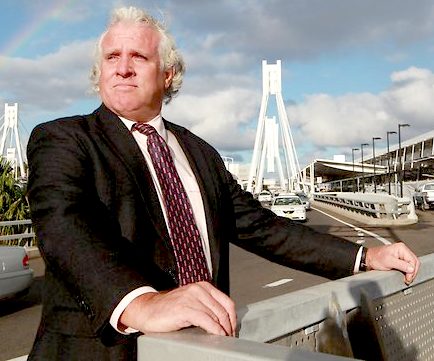
Technology and information are at the heart of modern business, government and society. Here, Steven Murray, Senior Associate in the
Defence, Security and The Forces team at leading law firm Harrison Clark Rickerbys, tells MOD DCB how companies can best protect their
intellectual
property.
With technology and information at the heart of society, businesses are increasingly aware of the value of their intellectual property (IP) and the importance of protecting it properly. Increasingly, ideas and innovations – IP, in fact – are used by their creators for competitive advantage by being licensed, rather than sold, so that their application is where commercial success is to be found.
It would be difficult to find a business that does not own and/or depend on IP. Businesses in the defence and security sector are no exception – indeed, they are often more dependent than most upon technology and technological innovation and, as a result of this, upon IP.
Knowing what IP assets a business has, and ensuring that it has taken appropriate steps to protect those assets, is the important first step in securing a business’s foundations. By way of a brief overview, the key IP rights are as follows.
AUTONOMOUS
SELF RIGHTING ABILITY EXAMPLE
A
robot ship has to rely on itself to cope with all sea conditions. In the
unlikely event that a freak wave were to capsize a SWASH hull with active
legs, a combination of moveable outriggers and floodable hull sections
will allow the onboard robot systems to turn the boat back upright - using
a sequence like that shown below. Please note that when capsized
deliberately, i.e. totally inverted, a test model hull came to rest
naturally on its side, as in figure 1. below. So, that is our starting
point for the recovery sequence.
1.
Flood main hull tanks
2. Lower raised leg
3. Fold submerged wing
SELF
RIGHTING SEQUENCE:
.
4.
Fill raised leg with water 5. Allow ship to
rotate back to horizontal 6. Pump water from
hulls
7.
to regain NORMAL RUNNING TRIM
DIAGRAM
10. - SELF RIGHTING: A robotic ship that is unmanned, has to be able to cope with
conditions that even a manned ship might not survive. Thus, in the event
of capsize by a rogue wave, or hurricane,
the active hull might use a sequence like that shown above to self-right
itself.
Should
a licensing partner wish BMS Ltd to conduct test for them, we might begin
at 1/20th scale, to ensure that the full size boat will behave as per the
above illustrations - and if required - conduct full size ocean trials.
Alternatively, a/any licensing partner might conduct tests themselves on
alternative designs. The design shown here is a useful and extremely
adaptable starting point.
SUN
TRACKER TO INCREASE HARVESTED ENERGY
Where
the PlanetSolar
used horizontal fixed panels for the most part with two large sliding
horizontal panels, and one smaller wing to the rear that hinged at the
beam - all being manually operated, this present invention amalgamates
robotic automation of a tracking system to align the wings of a craft to
face the sun, to increase harvested yield. That function is then allied to
similar robotic automation as applied to the wind harvesting element of
the invention.
DIAGRAM
11 - The above sequence shows how the robot ship changes the angle of its
hinged solar wing panels to align them to the incoming solar radiation
(insolation) - from sunset on the right, where the wings face east, to
sunset on the left, where the wings face west.
SOLAR
SAILOR - DUAL ENERGY HARVESTING ON A SINGLE AXIS
Many
years before the PlanetSolar
circumnavigated the globe using only solar energy, Robert Dane built the SolarSailor
which operates in Sydney Harbour, Australia. This concept uses a series of
aerofoil shaped wings, together with fixed solar panels, where the wings
may change position to track the sun, or to sail using the wind. The
energy harvesting medium thus shares the same axis of orientation which is
a disadvantage where the insolation may be coming from one direction in
the sky high above and the wind from another direction horizontal to the
earths surface, such that both energy sources may not be harvested
efficiently. This was/is though an ingenious example of a system that
provides a workable compromise for a part wind powered sail boat and a
part solar powered boat, but with lesser performance than might be
achieved using an independent axis system for dual energy
harvesting.
DIAGRAM
12 - LEFT: The SolarSailor
is seen above deploying its foil wings to capture the sun with 50% of its
wings laying horizontal and the wind with the other 50% of its wings
standing vertical. RIGHT: The SolarSailor
is seen above fanning its wings in butterfly fashion to capture the sun at only a fraction of
the efficiency that it might if all of the panels were aimed at 90 degrees
to the angle of insolation. One obvious advantage over a solar only boat such as
the PlanetSolar, is that the wing-sails may power the vessel at night when
there is no sunlight. Though an ingenious design that advanced the state
of the art, this combination may not achieve consistent cruising speeds in
the 10 knot region. The efficiency of conversion, hence the power to
weight ratio achievable, is simply too low. The advertised speed is in the
5 knot region. Solar Sailor is now trading as Ocius
Ocean Technology and have moved into the unmanned marine market with a
drone called Bluebottle.
MUNIN
A FP7 project to develop systems for an unmanned cargo vessel going by the
acronym MUNIN,
is a collaborative research project, co-funded by the European Commissions under its Seventh Framework Programme.
MUNIN – Maritime Unmanned Navigation through Intelligence in Networks,
aims to develop and verify a concept for an autonomous ship, to include enhanced shore-support and
an automated lookout for increased maritime safety, efficiency and reliability.
Both MUNIN and Rolls Royce presented at the SMM (Shipbuilding, Machinery & Marine Technology –
International Trade Fair) on September 10th 2014
in Hamburg.
DIAGRAM
13 - Rolls Royce
have developed (or are developing) a system for unmanned cargo ships, but
their technology is not yet advertised as being compliant with international
regulations - for sure they could be in the future. International
regulations need to be given a shove to approve such a system to allow
fleet operators to progress. In this artists impression of a tanker, there
are no energy harvesting devices,
though RR have done some work on foil wave
energy propulsion with grants from the TSB,
aiming to reduce fuel
costs - hence clean up the emissions of any vessel so equipped.
With
OAI onboard "Product Lifecycle Management" (PLM) monitoring,
might be used to forward design safer vessels, where product information and processes to be made readily accessible for all stakeholders, wherever they're located in the world.
PLM enables product development teams, to easily and quickly access up-to-date, accurate product information from anywhere in the world. It also allows them to participate in product-related processes, such as
authorizing engineering changes in future vessel designs.
ABOUT
PATENTS
Patents protect inventions (such as technologies and technological processes) that are new and involve an ‘inventive step’, ie that are not obvious to a reasonably skilled person in the relevant sector. Protection lasts for 20 years. While the process of obtaining a patent can take time, once granted a patent provides strong protection and a valuable
business asset that can be licensed to others to generate revenue.
Patents protecting inventions, registered designs protecting the appearance of products, and copyright in creative materials such as software or graphics, can all be licensed to third parties for financial
consideration.
Licensing
can be a two way stream the objective being that an income from licenses provides
the licensors with the means to keep registrations live, develop specific
technology and then apply
for improvement patents for fresh innovations for their associates, so keeping stakeholders ahead of current and future
trends - and the competition at bay.
ABOUT
REGISTERED
DESIGNS
Registered designs protect the appearance of the whole or part of a product. To be capable of registration a design must be novel and of individual character. Protection lasts a maximum of 25 years.
ABOUT
TRADE
MARKS
Registered trade marks are distinctive signs or symbols used by traders to distinguish their products or services from those of other traders. Protection lasts for ten years initially and can be renewed (indefinitely) for subsequent periods of ten years.
The above are all ‘registered’ rights and registration brings with it the highest level of protection. Although not capable of registration, copyright (which protects creative materials, including computer programs) and rights in confidential information (which covers know-how and trade secrets), are important forms of protection enforced by the courts. Both are complex areas where specialist legal advice is very necessary.
Having identified its IP, and registered what it can, a business should then consider how such IP can be used and
commercialized in order to drive business growth and generate revenue.
The defence and security sectors have an impressive history of commercializing
their IP – the Malvern scientists who developed
radar could not have known that we would be using it to forecast the weather, and those who explored the potential of liquid crystals would be astonished to see LCDs in every home and business.
Many companies use registered trade marks to generate revenue as well as to protect their business – licensing a trade mark for use by another, complementary firm (as, for instance, when Starbucks and Apple joined forces to bring music to coffee houses) can be a lucrative and imaginative option.
DIAGRAM
14 - A manned ship with a crew is unlikely to be able to fix a large
diesel or gas turbine engine at sea. Nuclear powered ships also require docking
for serious breakdowns. Minor issues will benefit a ship by having a
crew onboard as a quick fix. The advantage with an unmanned ship is that the robot
captain will never leave the ship, maintaining communications, steerage,
etc, until relief arrives. For nuclear powered vessels, the advantages
are staggering, where the loss of life is eliminated in the event of a
reactor disaster and meltdown. Submarines would
need to be supported to make this work. Contact BMS to find out more.
With an older manned
ship breakdown is more likely, but with an
unmanned vessel, early warning of potential failures is built into the
autonomous regime. Typically, there would be several layers of
redundancy in a ship that is designed to operate unmanned. Thus, if a
major failure occurred, the vessel might limp to port unaided. This is
particularly important with unmanned
submarines.
DIAGRAM
15 - Dedicated close proximity sensors (sonic and
infra red) might be mounted on a vessel as per this illustration, to be
used for docking and other precision positioning and obstacle avoidance
in ports, working in tandem with longer range lidar, etc. The same
sensors might work well during life saving operations at sea in compliance
with the SOLAS international safety at sea treaty.
DIAGRAM
16 - Is a schematic block diagram that shows
the logical switching sequence to achieve a command and control chain where navigation will
be at least as safe or safer than on a manned vessel, as per the rules of operation
below at: 1. - 8. Ultimately, the
vessel is monitored and controlled via satellite uplink radio control. There are
three main
control circuits: Autonomous,
Drone and Manual.
These are selectable from mission control. The three main circuits engage
the self-managed sub control blocks (which are autonomous fiefdoms in
their own right).
Autonomous mode may
only proceed with the all clear from the Collision
Avoidance Module. During any period where satellite communications
are lost with GHQ, then OAI fills in the gaps like any good Autopilot.
1. Autopilot steers correct heading at all times (even when ship not moving) waypoint to waypoint.
2. Motors engaged at all times subject to proximity sensors all clear (subject to 5 below).
3. Sensors give all clear - motor drive engaged subject to energy management.
4. Storm sensors disengage 2. above (stop motors) and engage degrees of lock down.
5. Collision avoidance software overrides 1. (ship performs avoidance moves as per
COLREGS)
6. Autopilot may be reprogrammed with a new mission via satellite link
monitoring.
7. Manual steering (drone mode) override disengages 1.
8. International monitoring system, warning ships so equipped of developing situation.
CIRCUIT
KEY:
Autonomous
mode ___ select
to engage fully automatic ship control
Manual
mode
___ select to allow an onboard crew to take control
Drone
mode
___ selection for controlling vessel remotely via satellite
Collision
avoidance ___ disengages autopilot to
apply new course
DIAGRAM
17 - An illustration showing a nuclear powered submarine (to scale) at a
depth of 30 metres (100ft) being detected by a Scorpion/Dragonfly ZCC, submarine
hunter/killer drone, and fired upon using MK48 Honeywell torpedoes that
are especially designed to tackle fast deep diving U
Boats, such as the US Navy's Seawolf
class, or UK Astute
submarines. The value of the nuclear submarine is roughly 23-35 times that
of the Scorpion ZCC, without taking into account human lives as
consequential losses. The effectiveness of such a chase may be increased
using the SeaNet
system.
Consider
also that in times of war, a nuclear submarine will take about a year to
complete. Whereas, a Scorpion
HK might be completed in less than a month due to much smaller
sub-assemblies that might be mass-produced in many factories at the same
time.
The
cost of producing a vessel like the Scorpion
or Dragonfly
HKs is dependent on the number to be produced. As with any mass-produced
item, the more you build the cheaper it becomes. As so much of the vessel
shares parts common to other versions used for civilian tasks, the cost is
likely to remain low, save that the cost of munitions may not be placed in
the same accounting category as ordinary merchant shipping.
TRADE
UNION OPPOSITION TO UNMANNED SHIPPING 2014
The
immediate reaction from the International Transport Workers Federation was
to vehemently oppose progress. This might be because they fear the loss of
up to 600,000 of their members' jobs, but have they thought it through, or is this
just a knee-jerk reaction. We believe the latter. Obviously, their
objective is to safeguard jobs, whereas our mantra is to save lives and
clean up the ocean.
Their
can be no dispute that the weakest link in the chain of command of a
vessel has been shown to be the human element. [See Marine
Accident Investigation Board statistics] Human error and then panic
in failing to correctly interpret information, is the most common cause of
accidents at sea, leading to total loss. We take the label "human
error" to cover a multitude of sins. Logically then, if you either
reinforce or supplant the conventional role of seafarers, with technology
that can only assist captains (owners of vessels) and their crews to make their journeys
as safely as possible, what possible objection can there be, other than Red
Flag syndrome (1861-1896), possibly tainted with dronalism. Such
attitudes slowed motorised transport to a crawl for over 30 years in the
1800s and saw the Board
of Longitude C. 1714, refuse to accept John
Harrison's invention of the marine chronometer as the means to improve
navigational accuracy at sea, until 1765?
This
important innovation heralds a new era of safety at sea and a sustainable
international transport system. Jobs need not be lost, rather a gradual transition
to new stations, where qualified sailors will be needed to watch over ships
at sea, and coming in and out of ports, as part of shore-based
hand-on-the-helm control and decision making that we believe will form
part of the process of inception.
Rather
than enter into a political squabble with the Unions, we'd rather reach a
mutual understanding of the issues and an agreement as to a practical
means to implementation. On that basis, we
would invite positive input from those leaders of the ITF who have
been elected to represent seafaring members.
Mr. Koji Sekimizu was elected Secretary-General of the Organization by the 106th session of the IMO Council in June 2011 for
a four-year period from 1 January 2012. The election was endorsed by the IMO's Assembly at its 27th session in November 2011.
IMO
LOOKING FOR 40,000 SEAFARING PROFESSIONALS BY 2030, OCT 2014
The International Maritime Organisation hopes to see at least 40,000 qualified seafarers by 2030 as the merchant fleet grows.
But attracting people to the profession is difficult, said IMO Secretary-General
Koji Sekimizu.
Speaking at the closing session of the Danish Maritime Forum
in October 2014, Sekimizu said, "This is a significant challenge. We need to generate interest in people, the younger generation. I am talking about people in Japan and other advanced nations.
We need to highlight the importance of shipping. We need to provide real tangible benefits for those people who will work on the sea. This is probably the biggest challenge."
Ship managers at the event told
IHS Maritime that recruiting sufficient seafarers would be challenging as the fleet grows not only in numbers but vessel sizes.
Wallem MD Simon Doughty said, "Ships are getting bigger so vessels would need more crew members. We might see more automation in future."
The gathering of more than 200
industry stakeholders included top shipping company executives and government ministers.
Predictions of world trade doubling and demand for ships was a hot topic.
Politicians need to understand the value of international shipping.
Historically seaborne trade had quadrupled every 40 years.
The implications of fleet growth was an element
"we really need to think about." Sekimizu conceded that the industry was in a period of
"adjustment" after the post-2008 crisis and absorbing overcapacity would probably take 10
years. Similar to the period it took to get to grips with the overhang of tonnage from the
1970s and 1980s.But the difference now from 40 years ago was the need to reduce emissions and to achieve that slow steaming could
imply an even larger fleet requirement.
The impact of EDI energy efficiency would ensure
growth in emissions would only be half the rate of fleet growth. "This is a significant potential contribution to the
current issue of greenhouse gases," said Sekimizu.
The IMO
General Secretary disclosed that he'd heard that the IMO is to release a greenhouse gases study. In 2007, shipping accounted for 2.7% of global CO2 emissions but by 2012 it had fallen to 2.2%, a
"significant" reduction of more than 20%. This was not down to regulation but slow steaming and tonnage
overcapacity, but "nevertheless I am sure this trend will continue" and by the year 2030 shipping could account for below
2%. "Again the IMO and international shipping is a good model for other industries,"
Sekimizu claimed.
The International Transport Workers’ Federation (ITF), the union representing about 600,000 of the world’s more than 1 million seafarers, is
opposed to unmanned shipping. Dave Heindel (Chairman of the ITF seafaring
section) is quoted as saying in London:
“It cannot and will never replace the eyes, ears and thought processes of professional seafarers,”
He went on to say in an emailed statement: “The human element is one of the first lines of defense in the event of machinery failure and the kind of unexpected and sudden changes of conditions in which the world’s seas specialize. The dangers posed to the environment by unmanned vessels are too easily imagined.”
We
would agree with such statement for small non-commercial shipping that
may not be equipped with OAI. That said, put the latest engine and fuel
monitoring equipment together with the latest robotic redundancy
techniques, and the OAI crewed vessel will always outperform a human
only crew and can predict potential engine failures. A robot captain never leaves its ship or thinks of its
own safety before that of the vessel. Indeed, the robot captain thinks
of the safety of the crew above all else. It does not take time out to
call Mrs Captain or speak to the children or a mistress at another port. A
robot Captain does not drink alcohol and does not suffer from sleep
deprivation, nor does a robot crew worry about wage cuts or when the next
meal is. At the very least, manning levels may be significantly reduced in
the near term and should be embraced by the industry as a means to
overcome crew shortages.
ABOUT
THE ITF
The ITF has been helping seafarers since 1896,
today representing the interests of seafarers worldwide, of whom over 600,000 are members of ITF affiliated unions. The ITF is working to improve conditions for seafarers of all nationalities and to ensure adequate regulation of the shipping industry to protect the interests and rights of the workers. The ITF helps crews regardless of their nationality or the
flag of their ship.
GENERAL
The International Transport Workers' Federation (ITF) is an international trade union federation of transport workers' unions. Any independent trade union with members in the transport industry is eligible for membership of the ITF.
Around 700 unions representing over 4.5 million transport workers from some 150 countries are members of the ITF. It is one of several Global Federation Unions allied with the International Trade Union Confederation (ITUC).
The ITF's headquarters is located in London and it has offices in Nairobi, Ouagadougou,
Tokyo, New Delhi,
Rio de
Janeiro, Amman, Moscow and Brussels.
OBJECTIVES
The aims of the ITF are set out in its Constitution. They are:
> to promote respect for trade union and human rights worldwide
> to work for peace based on social justice and economic progress
> to help its affiliated unions defend the interests of their members
> to provide research and information services to its affiliates
> to provide general assistance to transport workers in difficulty
Although the range of ITF activities is very wide, they can be best summed up under three key headings:
> representation
> information
> practical solidarity
The ITF represents the interests of transport workers' unions in bodies which take decisions affecting jobs, employment conditions or safety in the transport industry, such as the International Labour Organisation (ILO), the International Maritime Organisation (IMO) and the International Civil Aviation Organisation (ICAO).
A major function of the ITF is informing and advising unions about developments in the transport industry in other countries or regions of the world. The ITF also maintains a specialist education department, dedicated to the development of strong and democratic transport unions.
The ITF organises international solidarity when transport unions in one country are in conflict with employers or government and need direct help from unions in other countries.
The kind of solidarity needed can range from protest messages, demonstrations and political pressure, to direct industrial action in the form of strikes, boycotts etc. The ITF's worldwide campaign in the maritime industry against the use by ship owners of Flags of Convenience (FOCs) to escape from national laws and national unions is a good example of solidarity.
[Source: ITF Handbook, 2:1 Overview]
LEFT
- ITF President: Paddy Crumlin,
MUA, Australia, RIGHT - ITF General
Secretary Steve Cotton - might lead negotiations aimed at protecting jobs
for their members, while also improving safety at sea and so saving lives,
cargo and ships. It is inevitable that OIA equipped vessels will have a
better safety record than those without. Logically then, the ITF should be
supporting autonomous back-up to protect passengers of cruise liners at
sea crews on merchant vessels. The only way to see what the score is, is
to trial such systems.
ITF
Vice-presidents:
Africa/Arab World: Zenzo Mahlanghu, SATAWU, South Africa
Asia-Pacific: CA Rajasridhar, AIRF, India
Europe: Lars Lindgren, STF, Sweden
Latin America & Caribbean: Julio Sosa, LA
FRATERNIDAD, Argentina
North America: John Baker, ILA, United States
Women: Brigitta Paas, FNV, Netherlands (2014-2016), Ekaterina Yordanova,
FTTUB, Bulgaria (2016-2018)
ITF Section chairs:
Oliver Richardson, UNITE, Great Britain (Civil Aviation)
Paddy Crumlin, MUA, Australia (Dockers)
Johnny Hansen, NSU, Norway (Fisheries)
Nick Bramley, NICH, Switzerland (Inland Navigation)
Øystein Aslaksen, NLF, Norway (Rail)
Tony Sheldon, TWU, Australia (Road)
David Heindel, SIU, United States (Seafarers)
Tsuneyasu Goto, Service Rengo, Japan (Tourism)
JOHN HARRISON - The Longitude Prize was a reward offered by the British government for a simple and practical method for the precise determination of a ship's longitude. The prize, established through an Act of Parliament (the Longitude Act) in 1714, was administered by the Board of Longitude. It was eventually awarded in 1765 to
John Harrison for his chronometer.
This was by no means the first prize to be offered to solve this problem. Philip II of Spain offered a prize in 1567, Philip III in 1598 offered 6,000 ducats and a pension, whilst the States General of the Netherlands offered 10,000 florins shortly
after. But these large prizes were never won, though several people were awarded smaller sums for significant achievements.
Patents Strategies - The patent system does not take into account
the considerable cost of protecting ideas, and for such a short timescale
that returns on investment are unlikely. For this reason, you might want
to consider a strategy where much of the IP that you have developed is not
released to the public, etc, until such time as commercial partners are
secured.
Clearly,
the reason that letters patent were introduced, is not working to
encourage inventors to share information, hence advance mankind. Until
such time as the patent system catches up with the real world, BMS
recommends that stakeholders develop a strategy that takes into account
the economic unfairness of the system, that at the moment favors movie
makers, artists and writers.
AUTONOMOUS
VESSEL: There are many ways artificial
intelligence (AI) can be used in traditional vessel designs, but for
real advances toward zero emission ocean transport, advanced navigation in
unmanned
vessels, should be allied to energy harvesting from nature.
Without build
of a platform for testing, the technology will stand still. There is no such
thing as a government prize or grant for such work today. But, any nation that
is unprepared enough to send manned ships into battle to face unmanned
ships, has already lost the engagement. Simply put, a warship with a crew
that is aware that they are facing an unmanned fleet, will be less likely to
want to sacrifice their lives fighting machines. Not in Nelson's
Navy - Not in any man's Navy. World War Three will be fought
by robots.