|
|
AUTONOMOUS DOCKING IN HARBOUR
|
|
|||
|
ENTERING
A BUSY PORT
ONBOARD SYSTEMS
Autonomous navigation on the high seas is relatively easy to accomplish, with COLREGs protocols added to comply with the rules of the road. In addition to the above, if a robotic boat or ship is to be able to self-berth, there will be additional onboard equipment requirements and commands and control support sensors and computers, together with drone .......
PORT AUTHORITY
Larger harbours and ports should be able to support an autonomous docking. The bigger the ship, the more support with tugs and the like. The smaller the ship, the more it must be entirely self-reliant. We can learn from taking a look at NASA about the likely complications that they have encountered with autonomous docking that may parallel with ..........
ADVANCED MARITIME ROBOTIC DOCKING SYSTEM (AMRDS)
Docking is more or less the reverse of blue-water COLREGs navigation. Instead of keeping a safe distance from other objects, moving or not, the objective is to get very close to a designated GPS waypoint - and make soft contact. How then to achieve that when also seeking to avoid collisions in a busy harbour?
Take a look below at the difficulty docking in space presents. Okay, nobody wants to lose millions of $dollars of kit, but there are no other spacecraft cluttered about to avoid - thus, it should be a relatively easy task if conducted with built in safeguards at every stage.
The maritime solution is to ...........
FIVE BUSIEST PORTS WORLDWIDE
BY
NUMBERS OF CONTAINERS:
BY VOLUME: 5. Shanghai
NASA - AUTONOMOUS OPERATIONS IN SPACE
Generally, a space craft does not have to avoid more than one other spaceship, nor obey rules of the road. Thus, the marine 'AMRDS' is theoretically a harder nut to crack.
Since 1996, NASA has been developing a docking system to simplify operations and reduce risks associated with mating spacecraft. This effort has focused on developing and testing an original, reconfigurable, active, closed-loop, force-feedback controlled docking system using modern technologies.
The primary objective of this effort has been to design a docking interface that is tunable to the unique performance requirements for all types of mating operations (i.e. docking and berthing, autonomous and piloted rendezvous, and in-space assembly of vehicles, modules and structures).
The docking system must also support the transfer of crew, cargo, power, fluid, and data. As a result of the past 10 years of docking system advancement, the Low Impact Docking System or LIDS was developed. The current LIDS design incorporates the lessons learned and development experiences from both previous and existing docking systems. LIDS feasibility was established through multiple iterations of prototype hardware development and testing. Benefits of LIDS include safe, low impact mating operations, more effective and flexible mission implementation with an anytime/anywhere mating capability, system level redundancy, and a more affordable and sustainable mission architecture with reduced mission and life cycle costs.
In 1996 the LIDS project, then known as the Advanced Docking Berthing System (ADBS) project, launched a four year developmental period. At the end of the four years, the team had built a prototype of the soft-capture hardware and verified the control system that will be used to control the soft-capture system. In 2001, the LIDS team was tasked to work with the X- 38 Crew Return Vehicle (CRV) project and build its first Engineering Development Unit (EDU).
DOCKING WITH UNMANNED SPACECRAFT
For the first fifty years of space travel the main objective of most docking and berthing missions was to transfer crew, construct or re-supply a space station, or to test for such a mission (e.g. the docking between Kosmos 186 and Kosmos 188).
Therefore commonly at least one of the participating spacecraft was "manned", with a pressurized habitable volume (e.g. a space station or a lunar lander) being the target – the exceptions were a few fully unmanned Soviet docking missions (e.g. the dockings of Kosmos 1443 and Progress 23 to an unmanned Salyut 7 or Progress M1-5 to an unmanned Mir). Another exception were a few missions of the manned US
Space
Shuttles, like berthings of the Hubble Space Telescope (HST) during the five HST servicing missions.
NON-COOPERATIVE DOCKING
Docking with a spacecraft (or other man made space object) that does not have an operable attitude control system might sometimes be necessary, either to salvage it (capture), or to initiate a controlled de-orbit. Some theoretical techniques for docking with non-cooperative spacecraft have been proposed so far. Yet, with the sole exception of the Soyuz T-13 mission to salvage the crippled Salyut 7 space station, as of 2006, all spacecraft dockings in the first fifty years of spaceflight had been accomplished with vehicles where both spacecraft involved were under either piloted, autonomous or telerobotic attitude control. In 2007, however, a demonstration mission was flown that included an initial test of a non-cooperative spacecraft captured by a controlled spacecraft with the use of a robotic arm.
UNMANNED DOCKING OF NON-COOPERATIVE SPACECRAFT
Non-cooperative rendezvous and capture techniques have been theorized and, in a few instances, put into practice with
un-crewed spacecraft in orbit.
The
problems are very similar in nature to that BMS have proposed to release
and capture ROVs
for marine operations such as: oil exploration, mine
clearances and salvage.
Indeed, operating in harsh ocean conditions may present more of a
challenge - when once solved - could benefit space exploration, in
technology transfer.
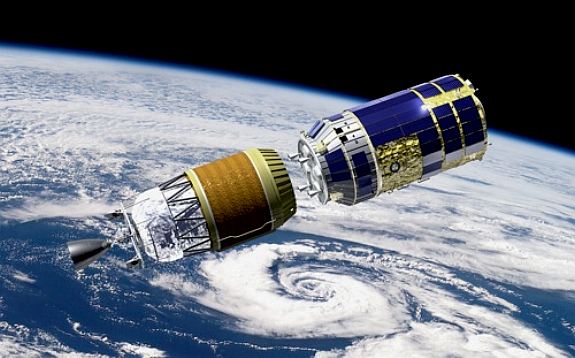
INNOVATIVE JAPANESE DOCKING PROCEDURE
- HTV
We are though talking about controlling a total weight of 16 tonnes (6 tonnes cargo + 10 tonnes spacecraft) launched at 27,000 km/h towards a group of modules housing 6 astronauts! And, even though the ISS is obviously orbiting the Earth at the same 27,000 km/h, the greatest caution is required to guarantee the safety of the crew.
The HTV is equipped with sophisticated avionics needed to join up with the Station in successive stages. A few days after its launch, it will make a first stop 23 km away. Then, the spaceship will be authorised to come within 7 km. If all goes according to plan, the automatic cargo ship will stop at just 500 m and then 300 m from the ISS.
Following further checks, the final docking procedure will begin and the HTV will then move to less than 10 m from the orbital complex. During this phase, the astronauts in the Station will be able to command the spaceship to stop once again or to move away if necessary. But they should then capture the HTV using the ISS’ Canadarm 2 robotic arm in order to pull it into the docking port on the Harmony module (which communicates with the European Columbus, American Destiny and Japanese Kibo laboratories).
This original procedure makes the final docking operation easier as the robotic arm can be used for grappling the HTV even if its final “parking” position varies by a meter. Whereas the standard docking procedure involving direct docking, such as that carried out by the American space shuttle, the Russian Soyuz rockets and Progress cargo ships as well as the European ATV cargo ships, requires a tolerance that must not exceed several centimeters. This clever Japanese scenario should maximize the chances of success.
BLUEFISH DEVELOPMENT PROJECT INDEX A-Z
A Bluefish ZCC depicting 40kW wind turbines [low operation mast height]. This is a 50 ton vessel. The total estimated energy harvesting capacity is around 176kW (235hp), giving an Energy Harvested to Displacement ratio (EH/D) of 3.52kW/ton (4.72hp/ton). Larger versions of this format could be the emission free cargo ships of the future.
The cost of diesel fuel to operate this ship continuously for a year is approximately: .29gals/hp x 117 x 24 x 365 = $297,226.80 (£183,393.99) In ten years that would be $2.97M (£1.83M). Fuel for thought!
EXTERNAL REFERENCE
UM autonomy students win robotic boat competition http://www.engin.umich.edu/college/about/news/stories/2010/june/u-m-autonomy-students-win-robotic-boat-competition Roboboat autonomous surface vessel competition https://egr.uri.edu/asvteam/the-competition/ Students project autonomous docking of freshwater sampling boat http://students.asl.ethz.ch/project.php?pid=260&aslsid=cc43623759b58c5d07e4e3c567429c84 http://www.researchgate.net/publication/4341090_Vision-based_docking_using_an_autonomous_surface_vehicle Enjoy Space Japan s space cargo ship Wikipedia Docking_and_berthing_of_spacecraft http://www.enjoyspace.com/en/editorial-cases/japan-s-space-cargo-ship http://en.wikipedia.org/wiki/Docking_and_berthing_of_spacecraft http://ntrs.nasa.gov Advanced+Docking+Berthing+System Massive-cargo-ship-will-harness-the-wind
Solar House, BN27 1RF, United Kingdom + 44 (0) 1323 831727 +44 (0) 7842 607865
INTERESTING EARLY DEVELOPMENT MODELS - LINKS
Blackcurrant 1 | Blackcurrant 2 | Catamaran Hull Design Drag | SWASH | SWATH | Trimaran
|
|||||
|
This page is Copyright © 2014 Bluebird Marine Systems Ltd. The names Bluebird™, Bluefish™, SeaNet™, and the blue bird & fish in flight logos are trademarks - the color blue is a protected element of the marks. All other trademarks are hereby acknowledged.
|
|||||