|
SEAVAX™ - LOW COST COMPUTER NAVIGATION
|
|
|
OCEAN ENTERPRISE 1 - FEASIBILITY STUDY
The Ocean Enterprise MK1, is a 1:20 scale fully functional model of a proposed autonomous, solar powered (small) ship that is designed to vacuum up plastic from the sea.
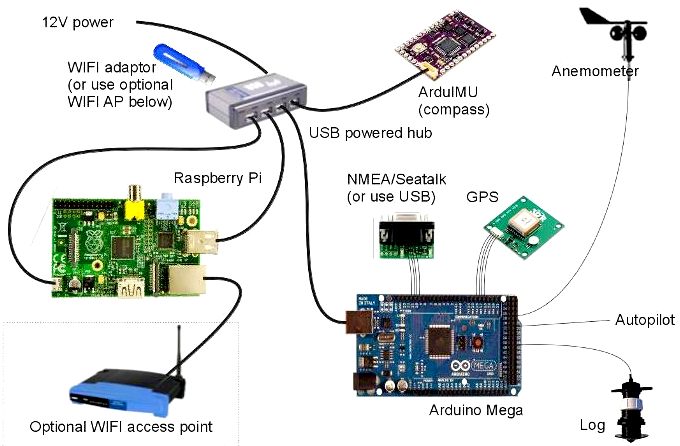
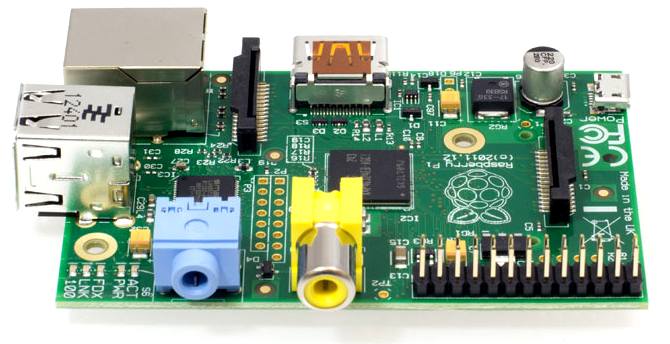
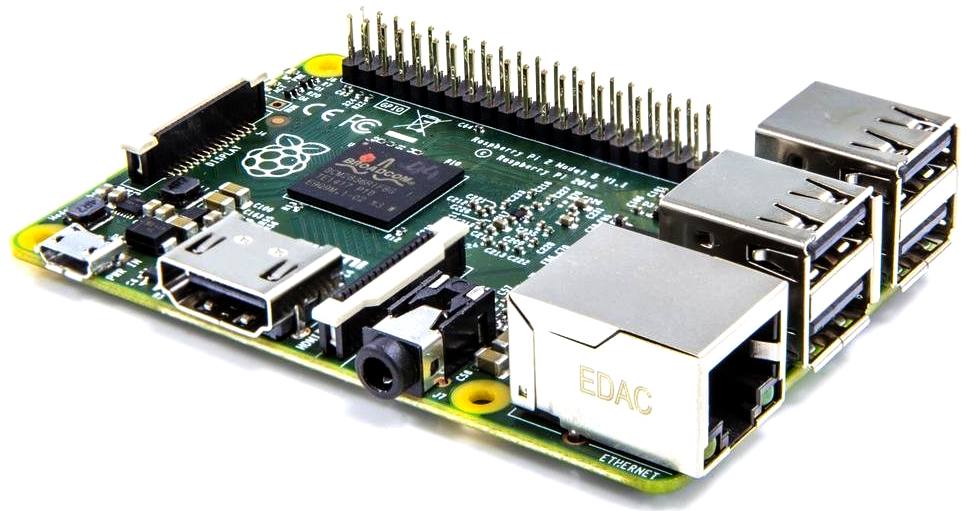
This concept relies on off the shelf components that can easily be adapted to form a comprehensive system, to include navigation and fleet control. Navigation systems based on Arduino and Raspberry Pi micro computers already exist and for the most part the code is open source.
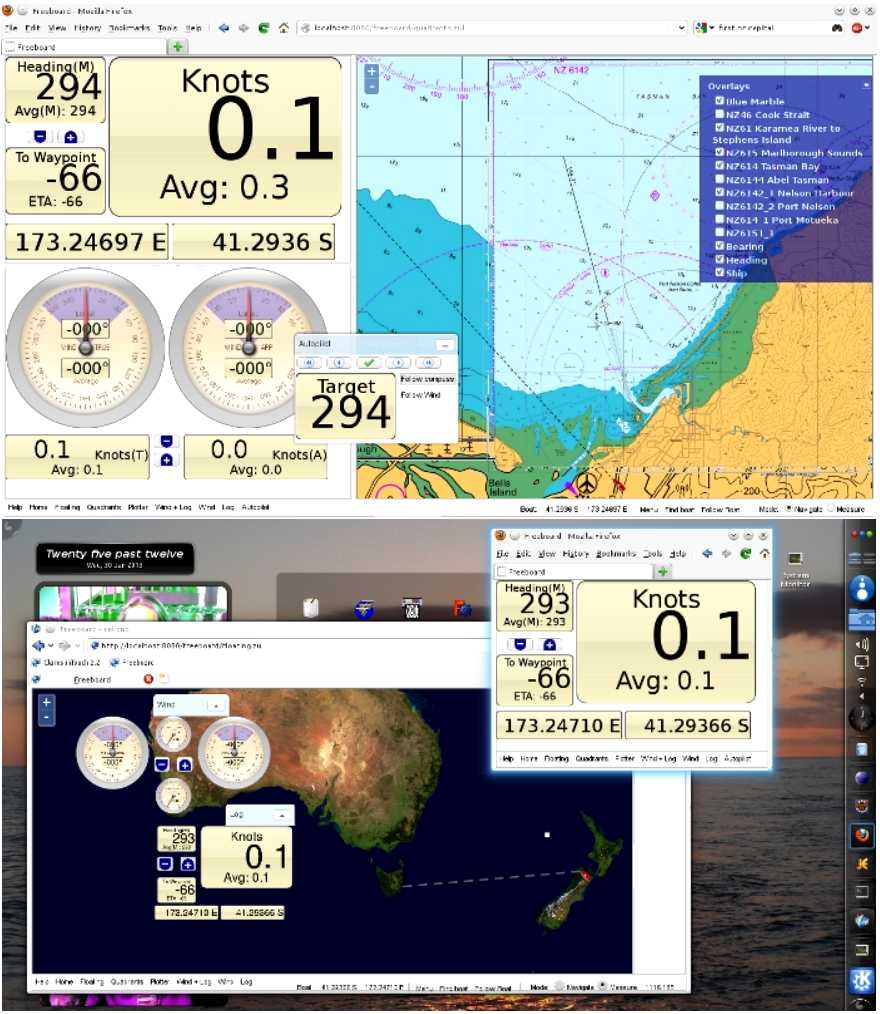
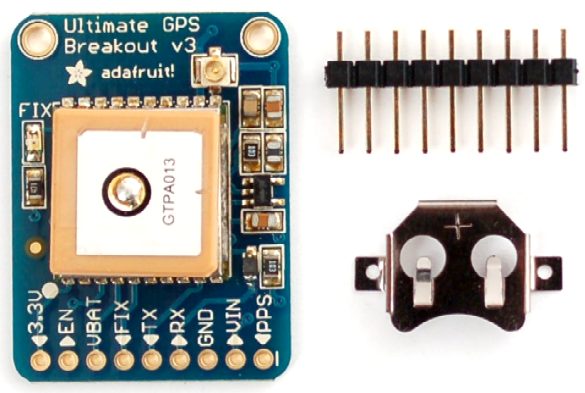
NAVIGATION, COMMAND & CONTROL - On-board directional control and navigation is provided by two Arduino microcontrollers and a GPS receiver - one Arduino to navigate like an Autopilot, and one to communicate via an Iridium transceiver. Telemetry data is to be sent back to the team using the Iridium satellite constellation and provided live as a visual display on the World Wide Web. Telemetry information can be relayed via Iridium 9612 every hour. For this study there is no need for encryption or security check logins. This is a good start for fleet management, where during operations each vessel would also be in communication with others in the same ocean to ensure an unbroken chain. The Scout Transatlantic used a similar system to good effect, until their steering gear broke - obviously, without security features. To make this system fully functional for navigating the SeaVax, we'd need to use a Raspberry + Arduino setup. Both the Raspberry and Arduino computers are versatile enough to run other onboard control functions and cheap enough that we can build in several layers of redundancy.
AUTOMATION - Arduino is an open-source electronics prototyping platform based on flexible, easy-to-use hardware and software. Arduino can sense the environment by receiving input from a variety of sensors and can affect its surroundings by controlling lights, motors, and other actuators. Arduino projects can be stand-alone or they can communicate with software running on a computer (e.g. Flash, Processing, MaxMSP).
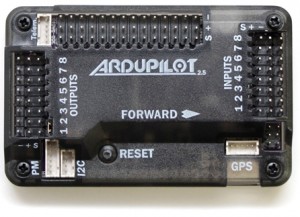
ARDUPILOT DRONE SOFT / HARDWARE - ArduPilot is an open source UAV platform created by the DIY Drones community. It is based on the Arduino open-source electronics prototyping platform. The first Ardupilot version was based on thermopile which relies on determining a hypothetical horizon by measuring the difference of temperature between the sky and the ground. With the participation of Jordi Muñoz, the system was improved to replace thermopile by IMU (Inertial measurement unit) using a combination of accelerometers and gyroscopes (and also optional magnetometers). This gave the IMU the advantage of being independent from climatic conditions. We don't need these functions on our SeaVax robots, but it is interesting how electronic solutions develop.
FULL AUTONOMY - 3D Robotics have developed the APM Universal Autopilot to provide fully autonomous control to a multitude of vehicles. The APM is a full UAV (Unmanned Autonomous Vehicle) autopilot, supporting piloted and unpiloted operation of vehicles, including hundreds of GPS waypoints, camera control and auto launch and docking. For the full size SeaVax vessels we will need more elaborate controls, but this is an excellent and workable solution for a small scale testbed.
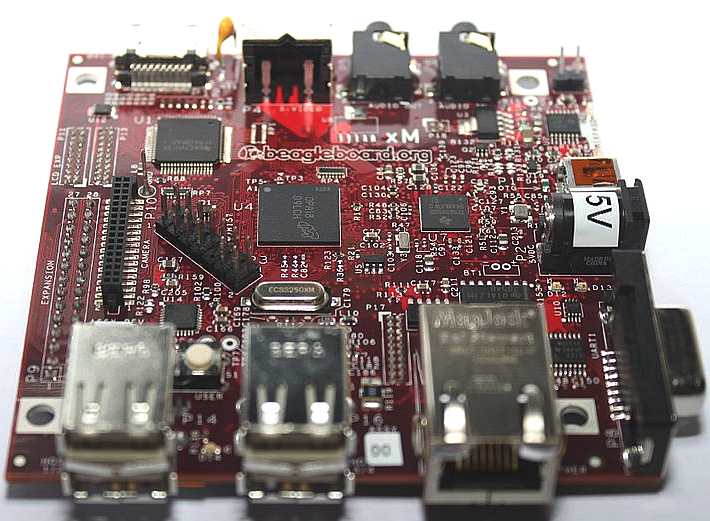
Other micro computer systems that may also be suitable for such controls are the: Beagleboard, Mbed, Picaxe and Raspbery pi. It won't be long before such systems are integrated, much like the Tom Tom revolutionized travel planning, and available off the shelf. Presently, military and research institutions play their cards close to their chest, in an effort to retain a monopoly on technology like this that should be readily available for the advancement of mankind.
BACKUP
For our limited trials we do not need to trouble ourselves with layers of redundancy. In these exercises - a simple re-boot will do should the system hang or crash. On the full size robot ship, built in fail safes are crucial to maintain reliable operation and recovery if all else fails. A backup system or vital parts of systems will form part of the operating systems on the prototype.
NAVIGATION TRIALS - We use two secure (controlled) locations to test our vessels in Sussex, in private. The picture directly above looks for all the world like Lake Dumbleyung in Australia in this light. Lake Dumbleyung is where Donald Campbell set the first of his unbeatable double achievement (land and water world speed records in the same year). The SeaVax test model will carry the blue bird legend as seen on our official merchandise.
SEAVAX NAVIGATION - FULL SIZE
Readers will not be surprised to learn that navigation instruments and equipment have advanced so far that the full size robot ship can use off the shelf autopilots and other navigation equipment to control the fleet, leaving automation of the cleaning functions as the main obstacle to conquer. We know a programmer who used an Amiga to control a whole bottling plant. The newer Raspberry and Arduino boards have buckets more computing power.
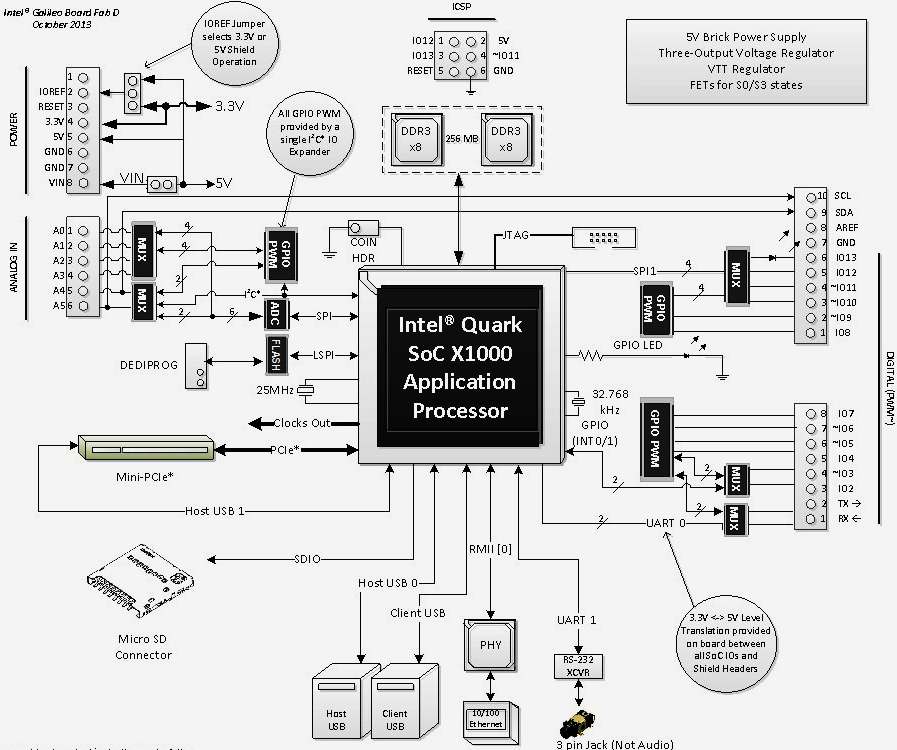
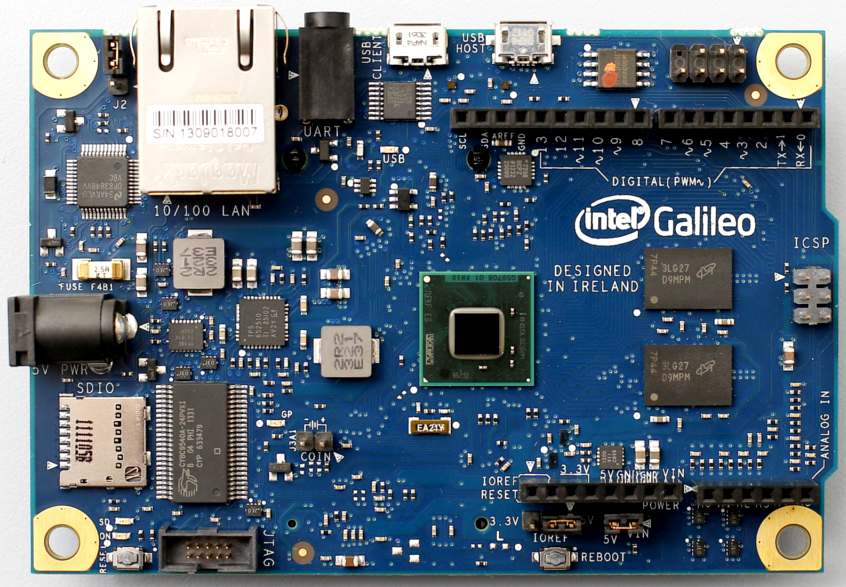
Galileo is a microcontroller board based on the
Intel® Quark SoC X1000 Application Processor, a 32-bit Intel Pentium-class system on a chip. It’s the first board based on Intel® architecture designed to be hardware and software pin-compatible with Arduino shields designed for the Uno R3. Digital pins 0 to 13 (and the adjacent AREF and GND pins), Analog inputs 0 to 5, the power header, ICSP header, and the UART port pins (0 and 1), are all in the same locations as on the Arduino Uno R3. This is also known as the Arduino 1.0 pinout.
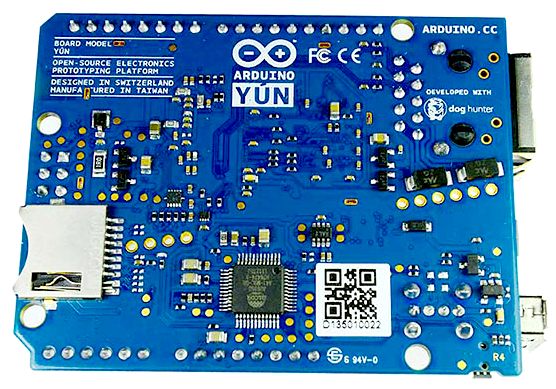
ARDUINO YUN COMPUTER LINUX COMBO
- Designed in collaboration with Dog Hunter, a company with extensive experience with Linux, the board adopts the Linino distribution which provides signed packages to ensure the authenticity of the software installed on the device.
LINKS
The marine installers rant blogspot 2013 arduino weds raspberry freeboard project Github Rob 42 freeboard server UU Gear raspberry pi arduino solution Temboo - Software code to connect hardware to the internet http://www.doghunter.org/ https://www.temboo.com/ http://www.arduino.cc/ http://blog.arduino.cc/category/wireless/ http://www.uugear.com/uugear-rpi-arduino-solution/ http://themarineinstallersrant.blogspot.co.uk/2013/05/arduino-weds-raspberry-freeboard-project.html https://github.com/rob42/freeboard-server http://www.42.co.nz/freeboard/ http://www.roboteq.com/index.php/roboteq-products-and-services/navigation-computers http://www.satsignal.eu/ntp/Raspberry-Pi-NTP.html arduino computer (open source) picaxe microcontroller (open source) http://www.youtube.com/user/RaspberryPiTutorials http://fishpi.org/contact.html http://rockblock.rock7mobile.com/ https://code.google.com/p/raspy-juice/ http://www.yellowbrick-tracking.com/ http://fishpi.org/wiki/index.php?title=The_Proof-Of-Concept_Vehicle http://fishpi.org/wiki/index.php?title=The_Prototype http://fishpi.org/wiki/index.php?title=Hull_Design http://www.modelsbydesign.co.uk/ http://www.raspberrypi.org/ http://international.findmespot.com/ http://www.amsat.org/
Youtube
ARCTIC - ATLANTIC - BALTIC - BERING - CARIBBEAN - CORAL - EAST CHINA - ENGLISH CH - GULF MEXICO
INDIAN - MEDITERRANEAN - NORTH SEA - PACIFIC - PERSIAN GULF - SEA JAPAN - STH CHINA
PLANKTON - PLASTIC OCEANS - RISING SEA LEVELS
Our love affair with plastic is choking the oceans. Once people know about it, they want to stop it. But how? The next question is who? Obviously, if any of the researchers involved so far had come up with a solution, they would have sorted it years ago. We are a practical think-tank fresh to the issue and without a budget. We hope to be able to collaborate with other marine organisations that are funded for this work, or who have funds to investigate viable projects. You cannot donate to us directly on this site, but we hope to identify partner sites shortly where you can support a project much like that proposed herein, or better still, our own practical experiments. Volunteer careers.
|
|
|
This website is Copyright © 2015 Bluebird Marine Systems Ltd. The names Bluebird™, Bluefish™, SeaNet™, SeaVax™ and the blue bird and fish in flight logos are trademarks. CONTACTS The color blue is a protected feature of the trademarks.
|