|
|
MOST - AUTONOMOUS VESSELS LTD
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Mike Poole and David Maclean - Autonaut launch and recovery
MARINE TECHNOLOGY NEWS 14 JUNE 2016 - AUTONAUT 5m COMPLETES PERFORMANCE TRIALS
The brand new AutoNaut 5m vessel has undergone testing in QinetiQ’s Ocean Basin at the Haslar Marine Technology Park. The new design was put through its paces in a range of wave conditions to evaluate the performance of the
patented AutoNaut Wave Foil Technology at the 5m size.
DEVELOPMENT - Using only energy from nature, the largest of the AutoNaut family is able to collect and transmit ocean data reliably, where speed is not as important as solid performance. QinetiQ's giant water basin is an ideal venue for such evaluations.
Dan Alldis, MOST (Autonomous Vessels) Design Manager said, “This is not the first time we have had an AutoNaut in the wave tank, as we completed a significant testing round with our original prototype 3m vessels. This round of testing allowed us to validate our speed and motion scaling calculations from previous testing, and provided us with a chance to test new wave foil configurations.”
SUCCESSFUL FIRST MISSION 4 NOV 2014
The
AutoNaut USV has arrived back in the Isles of Scilly after a 13 day autonomous mission in which she weathered a 70 mph
Atlantic storm while gathering scientific data.
On this voyage AutoNaut ‘Gordon’, built for the National Oceanography Centre (NOC), was towing a 25m hydrophone array at a depth of 4m, as well as carrying an AirMar weather station, a pyronometer to measure sunlight, two cameras for seabird and marine litter survey work, and a WetLabs Triplet Puck measuring chlorophyll and other aspects of sea water quality.
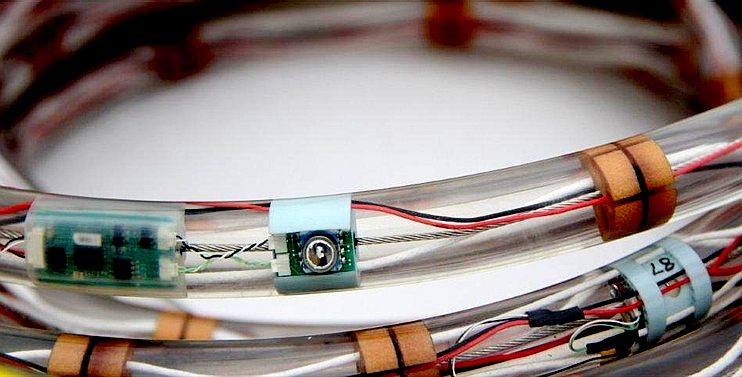
NarcineArray is a product family of small diameter passive acoustic line arrays suitable for static or towed applications that can be configured to specific customer requirements. J+S have made use of their knowledge and experience of larger diameter arrays to develop this highly adaptable product that is uniquely suitable to today’s underwater environment. When compared with a conventional towed array, NarcineArray provides a significant reduction in power consumption, diameter (down to 16mm), weight and drag. This means that the array can be deployed and recovered far more easily, often without any specialist handling equipment. Because of the reduced weight, drag and power consumption NarcineArray can also be deployed from a much greater range of vessels, from conventional surface vessels to Unmanned Surface Vessels (USVs) and Unmanned Underwater Vehicle (UUVs).
Mike Poole Director of MOST (AV) added:
“the combination of NarcineArray and AutoNaut has great potential. This trial has proven conclusively that the 3.5m AutoNaut has the wave-power to manage this amount of drag in rough ocean conditions and to remain completely controllable by the pilots ashore guiding her via Iridium satellite communication. We look forward to working with J+S to develop the concept to meet customer requirements.”
AutoNaut, the revolutionary wave propelled vessel for ocean research, was launched at Oceanology International in London in March 2014. Built by MOST (Autonomous Vessels) Ltd for very long endurance autonomous data gathering the 3.5 metre AutoNaut also harvests solar energy at sea to power her state of the art electronics. The new unmanned surface vessel (USV) uses motion from the ocean to propel herself, silently, with stability and zero emissions. Fresh back from sea trials with AutoNaut in Scotland founder Directors David Maclean and Mike Poole are on hand at Oi 2014, stand D445, to explain her potential and answer questions as visitors get their first chance to see the unique vessel.
THE COMPANY
AutoNaut™ is this company's brand name for its unmanned vessels. It all started in 2012 when David Maclean of MOST Ltd, and Michael Poole of Eco-nomic Ltd came together to develop and market the AutoNaut wave propulsion system as an autonomous vessel designed for scientific ocean research, commercial data gathering, and defence applications.
MOST (AV) Ltd. began trading on 1st January 2013 with the grant of a worldwide exclusive licence from Eco-nomic Ltd (who hold a patent for the system) and the grant of £400k from the National Oceanography Centre for Phase 2 of their call to develop a ‘Long Endurance Marine Unmanned Surface Vehicle’ (LEMUSV).
Their mission has since been to become the global leader in autonomous wave propelled vessels. They wanted to build a reputation for robust engineering and electronics, and dedication to customers. MOST (AV) aim to stay at the forefront of this technology through long term commitment to R&D.
This company says that their disruptive technology coincides with an increasing world market for autonomous capability. In particular a market for low cost (relative to manned ships), zero emission, unmanned surface vessels (USVs), that are able to stay at sea for months and perhaps years, with the potential to cover vast ocean areas - for data gathering missions, etc.
The Autonaut is too small to carry ROVs or other arrays, or weapons, but that could be rectified in the future if as must be the case the technology is at least scaleable to the extent of wave maximums. They intend building the company for the long-term and seek investors who like their concept.
As well as seeking
major investors, MOST AV Ltd has taken substantial early investments from ‘friends and family’
to enable the company to accelerate its commercial potential.
THE DIRECTORS
DAVID MACLEAN - EXECUTIVE CEng FIMarEST MRINA Commodore, Royal Navy (retired 2003)
David spent
15 years+ in MoD procurement roles including as T23 Frigate Warship Project Manager (1997-1999) and LPD(R) IPTL (2000-2003). He joined BMT Defence Services Ltd in 2004, setting up BMT Defence Services (Australia) Pty in Melbourne in 2005 and becoming Defence Director for the holding company, BMT Group Ltd, in 2006.
MIKE POOLE - EXECUTIVE
Mike developed the original ideas for the AutoNaut over a number of years
(see full story) and design iterations. He has a wealth of practical marine operations experience including 10 years as a professional sailboat skipper with the French shipping company OSCOSA and a DoT Yachtmaster Ocean qualification.
JAMES FANSHAWE CBE - CHAIRMAN (RN Retired)
James is active in a number of roles within the UK maritime industry after a career in the
Royal Navy during which he held five commands.
He was on the Board of Shoreham Port Authority for 6 years and is currently on the Board of several other companies. He is the President of the UK Anchorites and a Freeman of the City of
London.
DR MARK SCIBOR-RYLSKI PhD
Mark is an experienced technology/innovation manager with industrial, financial, and engineering
skills. He acts as a mentor to environmental businesses in the South West on behalf of the Gatsby Trust. Mark has made many investments, raised funding, acted as a turnaround manager, sold and floated companies, and set up commercial partnerships for them.
PROF GWYN GRIFFITHS
Gwyn
is an associate and Board Advisor to MOST (AV) Ltd. Through Autonomous Analytics Gwyn became a non-executive director of MOST (AV) Ltd in September 2013. He recently retired as Head of Marine Autonomous and
Robotic Systems within the National Marine Facilities Division of the
National Oceanography Centre, and
as Professor in the School of Engineering Sciences, University of Southampton.
THE AUTONAUT USV
The AutoNaut has a scalable wave propulsion technology - this is beyond doubt where foils have been used on fishing vessels such as the Norwegian: Kystfangst and the Russian trawler: Nikolaev. A larger boat could have more speed, except that the WAFT project found that 3 knots was about the gain for wave-foil assisted propulsion. We don't have more details unfortunately - and the two projects share a common bond. That is not to say that the MOST system cannot provide MORE.
AutoNaut’s new operating potential includes new ways to deploy a range of sensors. The list will grow but indicatively sensors currently being deployed and discussed with customers are:
MAST – AirMar weather station. Campbell Scientific insolation sensor.
HULL – Teledyne Acoustic Doppler Current Profiler, Wetlabs Triplet Puck, RBR Concerto CDT, a range of multi-beam echo sounders and sonars for pipeline survey, mine detection and other purposes, cytobot and ocean acidification sensors, thermistor and acoustic arrays.
Other
applications under test are towing (performed well) and the incorporation of a
winch.
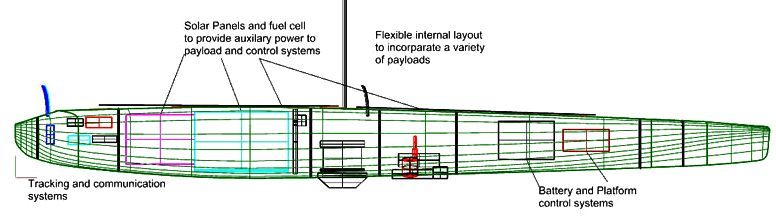
Internal layout of the 3.5m Autonaut
AUTONAUT'S SPECIFICATIONS
CONTACTS
MOST (Autonomous Vessels)
Ltd
Tel: +44 (0) 1243 511 421 +44 (0) 1822 840 612
Email: info@autonautusv.com Website: www.autonautusv.com/
Youtube:
http://www.youtube.com/autonautusv
LINKS & REFERENCE
http://folk.ntnu.no/eirikbo/wavepropulsion/index http://www.theengineer.co.uk/engineers-called-on-to-develop-new-low-carbon-ship-propulsion http://www.newscientist.com/wavepower-ships-could-bring-cheaper-clean-electricity http://www.wavepropulsion.com/ Ashburton Guardian (1897). A boat with fins. Volume XVIII, Issue 4281, 30 August 1897. Unmanned Systems Technology November 2014 Autonaut USV successfully completes first mission Marine Technology News autonaut Oceanology International Exhibitors Stand D455 Autonaut http://www.marinetechnologynews.com/news/autonaut-completes-performance-trials-534262 http://www.oceanologyinternational.com/en/Exhibitors/241045/Autonaut http://www.marinetechnologynews.com/News/c/autonaut http://www.unmannedsystemstechnology.com/2014/11/autonaut-usv-successfully-completes-first-mission/ Burnett, R. F. (1979). Wave energy for propelling craft - nothing new. The Naval Architect. Nov. 1979, p. 239.
SOLAR VOYAGER - Two hefty PV panels are low in the water so will get a dousing routinely, but should stay clean enough for the crossing. This has not been a problem for the Autonaut. The concept is similar to the SeaCharger below and the Scout seen on this page, but that the Scout attempted to set the Atlantic unmanned record in 2013, whereas the Solar Voyager made her attempt in 2016.
SEACHARGER SOLAR BOAT - Being recovered by a passing ship at sea, this boat is very similar in concept to the Solar Voyager above but attempted to travel across the Pacific to set a record for unmanned endurance boats in 2017. The SeaCharger made it from California to Hawaii, but came a cropper near to New Zealand. Valliant attempts all and there is always room for one more....
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
This website is Copyright © 2017 Bluebird Marine Systems Ltd. The names Bluebird™, Bluefish™, RiverVax™, SeaNet™, SeaVax™, and the blue bird & fish in flight logos are trademarks. All other trademarks are hereby acknowledged.
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||